↗ arXiv ↗ Hugging Face ↗ Papers with Code
TL;DR#
Many existing human motion generation models produce unrealistic movements due to the lack of physical constraints. This paper tackles this issue by introducing the problem and demonstrating the limitations of current methods which often overlook the fundamental physics of human motion, resulting in artifacts like floating and foot sliding. These issues are especially problematic for applications demanding realism, such as virtual reality and robotics.
The proposed solution is Morph, a two-stage framework comprising a motion generator and a motion physics refinement module. The refinement module leverages synthetic data to train a motion imitator within a physics simulator, ensuring physical plausibility. This refined data, in turn, is used to fine-tune the generator. Morph’s model-agnostic design makes it adaptable to different models and tasks, while its reliance on synthetic data makes it cost-effective and widely applicable. Experiments show significant improvements in physical accuracy without sacrificing motion quality.
Key Takeaways#
Why does it matter?#
This paper is important because it presents Morph, a novel framework that significantly improves the physical plausibility of human motion generation without relying on costly real-world data. This addresses a major limitation of existing methods and opens new avenues for research in physically realistic animation and robotics. The model-agnostic nature of Morph makes it highly versatile and applicable to a wide range of motion generation models and tasks. Its efficiency and effectiveness make it a valuable contribution to the field, particularly given the increasing demand for high-quality, physically accurate human motion in applications such as virtual reality and robotics.
Visual Insights#

🔼 The figure showcases examples of common physical inaccuracies generated by existing human motion generation models. These inconsistencies include instances of ground penetration, where body parts appear to intersect with the ground; unnatural backward leaning; body parts intersecting with each other (interpenetration); foot sliding, where feet do not maintain proper contact with the ground; characters appearing to float above the ground; and unnatural rotations of body parts.
read the caption
Figure 1: Examples of physical inconsistencies in generations.
| Model Number | Methods | Methods | Methods | Methods | Methods | Common Generation Metrics | Common Generation Metrics | Physical Plausibility Metrics | Physical Plausibility Metrics | Physical Plausibility Metrics | Physical Plausibility Metrics | Physical Plausibility Metrics | Physical Plausibility Metrics | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IS | Adversarial | Energy | Real Data | FT | RTOP-3 ↑ | FID ↓ | PFC ↓ | Penetrate ↓ | Float ↓ | Skate ↓ | IFR ↓ | |||
| A | Baseline (only motion generator MoMask [7]) | 0.807 | 0.045 | 1.058 | 23.152 | 10.660 | 5.262 | - | ||||||
| B | ✓ | ✓ | ✓ | 0.792 | 0.194 | 0.852 | 0.000 | 2.272 | 0.020 | 0.0155 | ||||
| C | ✓ | ✓ | 0.782 | 0.276 | 0.735 | 0.000 | 2.554 | 0.032 | 0.0362 | |||||
| D | ✓ | ✓ | 0.790 | 0.165 | 0.715 | 0.000 | 2.376 | 0.026 | 0.0272 | |||||
| E | ✓ | ✓ | ✓ | 0.801 | 0.077 | 0.672 | 0.000 | 2.271 | 0.011 | 0.0155 | ||||
| F | ✓ | ✓ | ✓ | ✓ | 0.785 | 0.183 | 0.749 | 0.000 | 2.451 | 0.017 | 0.0338 | |||
| G | ✓ | ✓ | ✓ | ✓ | 0.816 | 0.043 | 0.651 | 0.000 | 2.146 | 0.010 | 0.0151 |
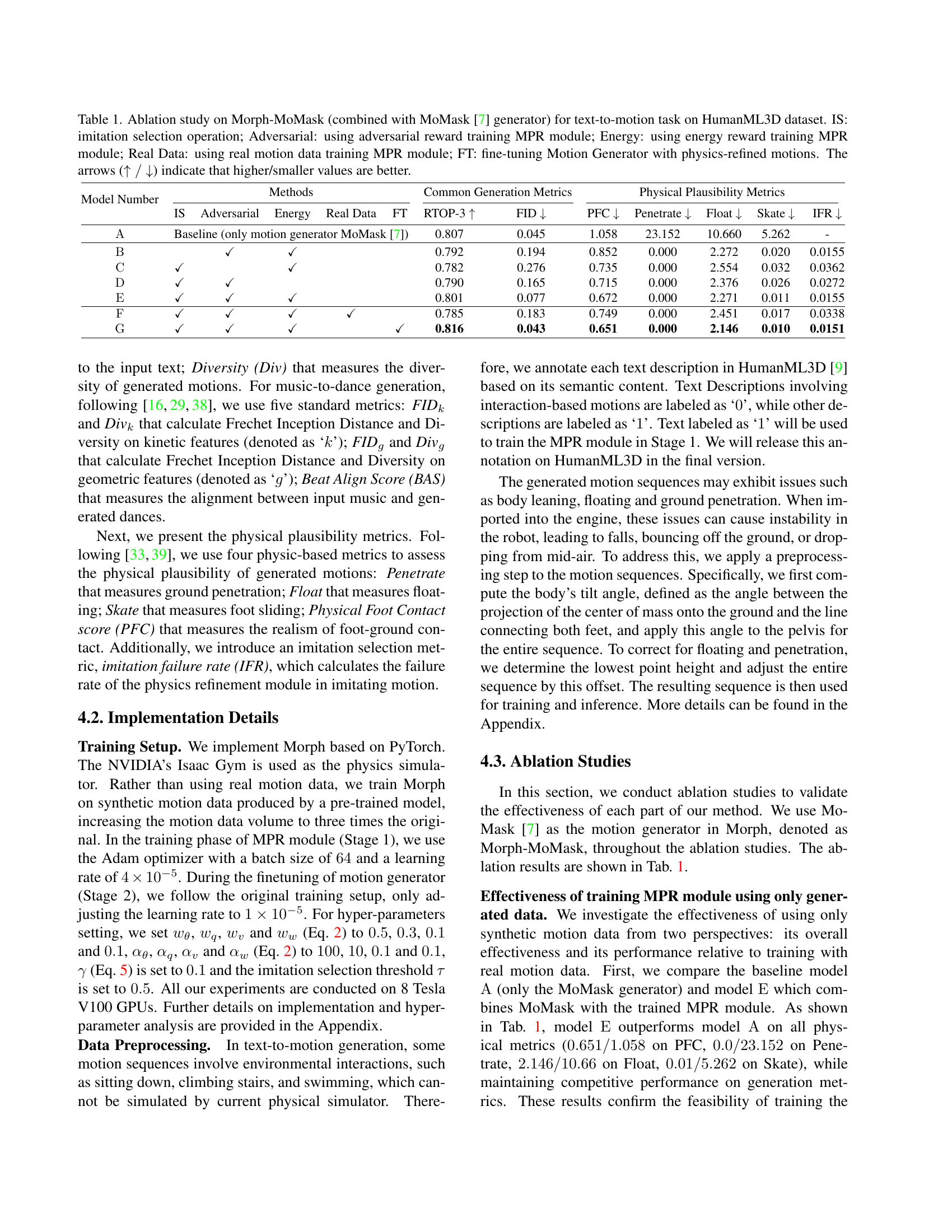
🔼 This ablation study analyzes the impact of different components of the Morph framework, when combined with the MoMask motion generator, on text-to-motion generation using the HumanML3D dataset. It examines the effects of the imitation selection operation (IS), the use of adversarial and energy rewards during training of the Motion Physics Refinement (MPR) module, and the use of real motion data versus synthetic data for training the MPR module. Finally, it evaluates the impact of fine-tuning (FT) the Motion Generator using physics-refined motions. Higher values are better for metrics with an upward-pointing arrow (↑), and lower values are better for metrics with a downward-pointing arrow (↓).
read the caption
Table 1: Ablation study on Morph-MoMask (combined with MoMask [7] generator) for text-to-motion task on HumanML3D dataset. IS: imitation selection operation; Adversarial: using adversarial reward training MPR module; Energy: using energy reward training MPR module; Real Data: using real motion data training MPR module; FT: fine-tuning Motion Generator with physics-refined motions. The arrows (↑/↓↑↓\uparrow/\downarrow↑ / ↓) indicate that higher/smaller values are better.
In-depth insights#
Motion-Free Physics#
The concept of “Motion-Free Physics” in the context of human motion generation is a fascinating and potentially impactful innovation. It directly addresses the limitations of traditional physics-based approaches which often require large, high-quality motion capture datasets. The key idea is to decouple the physics simulation from the explicit use of motion data during training. This is achieved by training a physics refinement module on synthetic, noisy motion data generated by a motion model. This module learns to project noisy motions into a physically plausible space within a physics simulator. This bypasses the need for real-world motion data, making the process significantly more scalable and efficient. The refined motions, in turn, can be used to fine-tune the motion generator, improving its ability to produce physically correct results from the start. The result is a system that generates more realistic and believable movements, while being computationally more accessible. The innovation lies in the ability to achieve physical plausibility without a direct reliance on time-consuming and expensive motion capture, and instead leverages the power of physics simulation and synthetic data. This ‘motion-free’ paradigm opens new avenues for research and development in virtual character animation and robotics.
Two-Stage Training#
The research paper employs a two-stage training process to effectively enhance the physical plausibility of generated human motion without relying on extensive real-world motion capture data. The first stage focuses on training a Motion Physics Refinement (MPR) module using synthetic, noisy motion data. This module learns to project noisy motions into a physically plausible space by leveraging a physics simulator and a motion discriminator. This clever decoupling of physics optimization from the generation model itself is key. The second stage involves fine-tuning the motion generator using the high-quality, physically plausible motion data generated by the MPR module in the first stage. This significantly improves the generator’s ability to produce realistic motions, leading to a substantial enhancement in the overall quality and physical fidelity of the generated output. This two-stage approach is efficient and model-agnostic, allowing for adaptability to different generation models. The framework’s success highlights the power of using synthetic data effectively to improve motion generation, addressing common artifacts like floating and foot sliding, while maintaining high generation quality.
Model-Agnostic#
The concept of a ‘model-agnostic’ approach in the context of this research paper is a significant contribution. It implies that the proposed physics optimization framework, Morph, can be seamlessly integrated with various pre-trained motion generation models without requiring substantial modifications or retraining. This is crucial because it avoids the limitations of methods tailored to specific model architectures (e.g., diffusion models) and significantly improves flexibility and scalability. By decoupling physics optimization from the core generation model, Morph enhances the generalizability and applicability of physics-based improvements to a broader range of motion generation techniques, ultimately leading to more physically plausible results in various downstream tasks.
Noisy Data Use#
The concept of ‘Noisy Data Use’ within the context of this research paper is pivotal. The authors cleverly leverage synthetically generated, imperfect motion data rather than relying on expensive and difficult-to-acquire real-world motion capture datasets. This innovative approach allows them to train their physics refinement model (MPR) without the constraints of high-quality, meticulously captured data. The use of noisy data is not a limitation but a strength, forcing the MPR to learn robust physical constraints, effectively filtering out implausible motions. This method is model-agnostic, meaning it’s not tied to a specific motion generation model, thus enhancing its flexibility and generalizability. The resulting model demonstrably improves the physical realism of generated motions, and this strategy significantly reduces reliance on costly and time-consuming data acquisition, making the overall approach both efficient and effective. The two-stage training process, where initially noisy data trains the MPR, and then this refined data further fine-tunes the motion generator, showcases an intelligent iterative system, leveraging the noisy data not as an error source, but as a critical component of a powerful feedback loop.
Future Directions#
Future research directions for physics-based motion generation should prioritize improving the efficiency and scalability of physics optimization techniques. Current methods often rely on computationally expensive iterative processes. Developing more efficient algorithms or leveraging hardware acceleration could significantly improve real-time performance. Further work should explore more sophisticated physics models that accurately capture the nuances of human biomechanics, such as muscle dynamics and contact interactions. This would lead to more realistic and less prone to artifacts. Another critical area is handling complex environmental interactions, enabling agents to interact naturally with objects and surfaces. This requires robust collision handling and physically plausible contact modeling. Finally, data-driven approaches should be further explored to augment physical models, potentially learning physics parameters or constraints from real or simulated data. This hybrid approach promises enhanced realism and generalization capabilities.
More visual insights#
More on figures

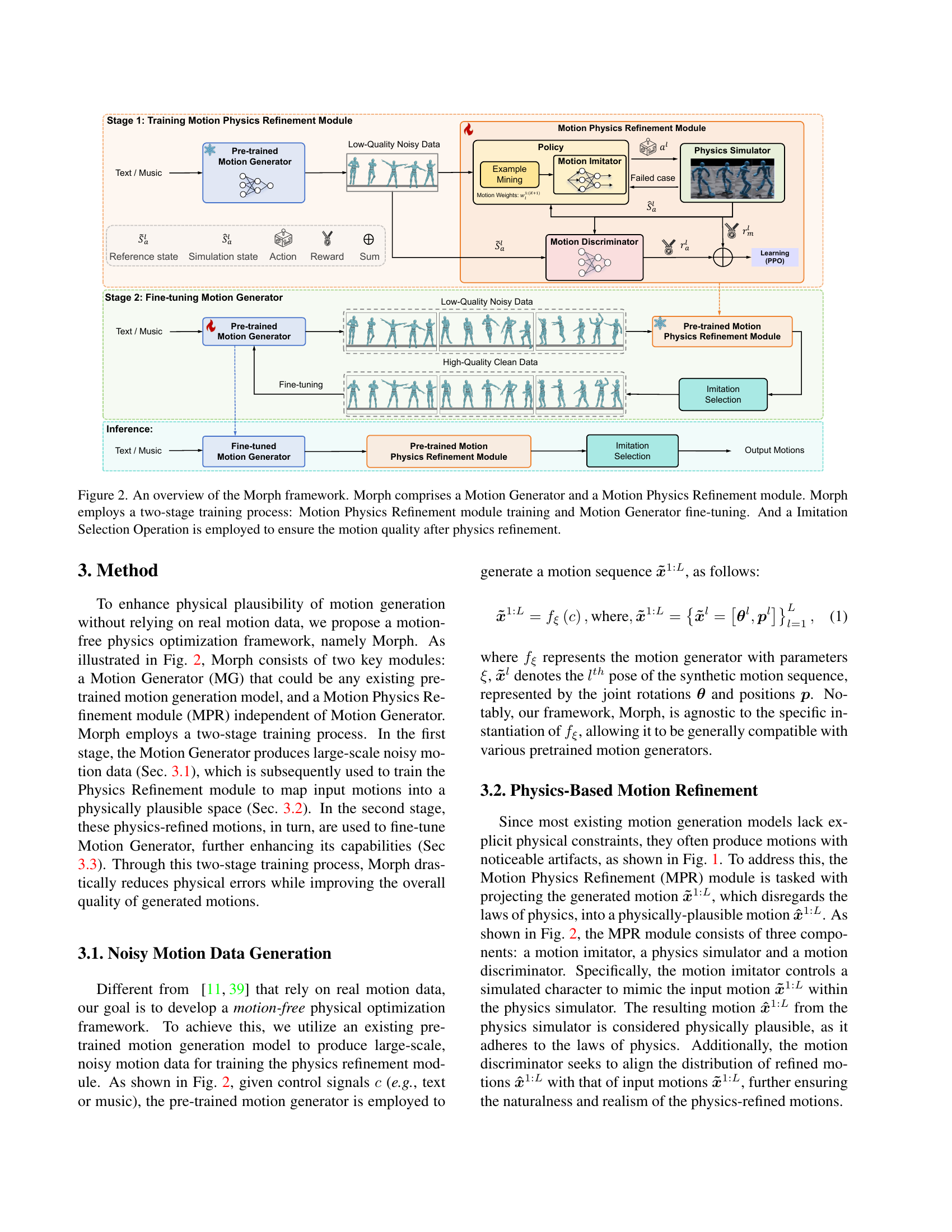
🔼 The Morph framework consists of two main modules: a Motion Generator (MG) and a Motion Physics Refinement (MPR) module. The framework uses a two-stage training process. Stage one trains the MPR module using synthetic noisy motion data generated by the MG. The MPR module projects noisy motions into a physically plausible space using a motion imitator within a physics simulator, enforcing physical constraints and learning from feedback from a motion discriminator. Stage two uses the physically refined motions from the MPR module to fine-tune the MG, enhancing its ability to generate physically plausible motions. Finally, an Imitation Selection Operation filters out non-grounded motions.
read the caption
Figure 2: An overview of the Morph framework. Morph comprises a Motion Generator and a Motion Physics Refinement module. Morph employs a two-stage training process: Motion Physics Refinement module training and Motion Generator fine-tuning. And a Imitation Selection Operation is employed to ensure the motion quality after physics refinement.

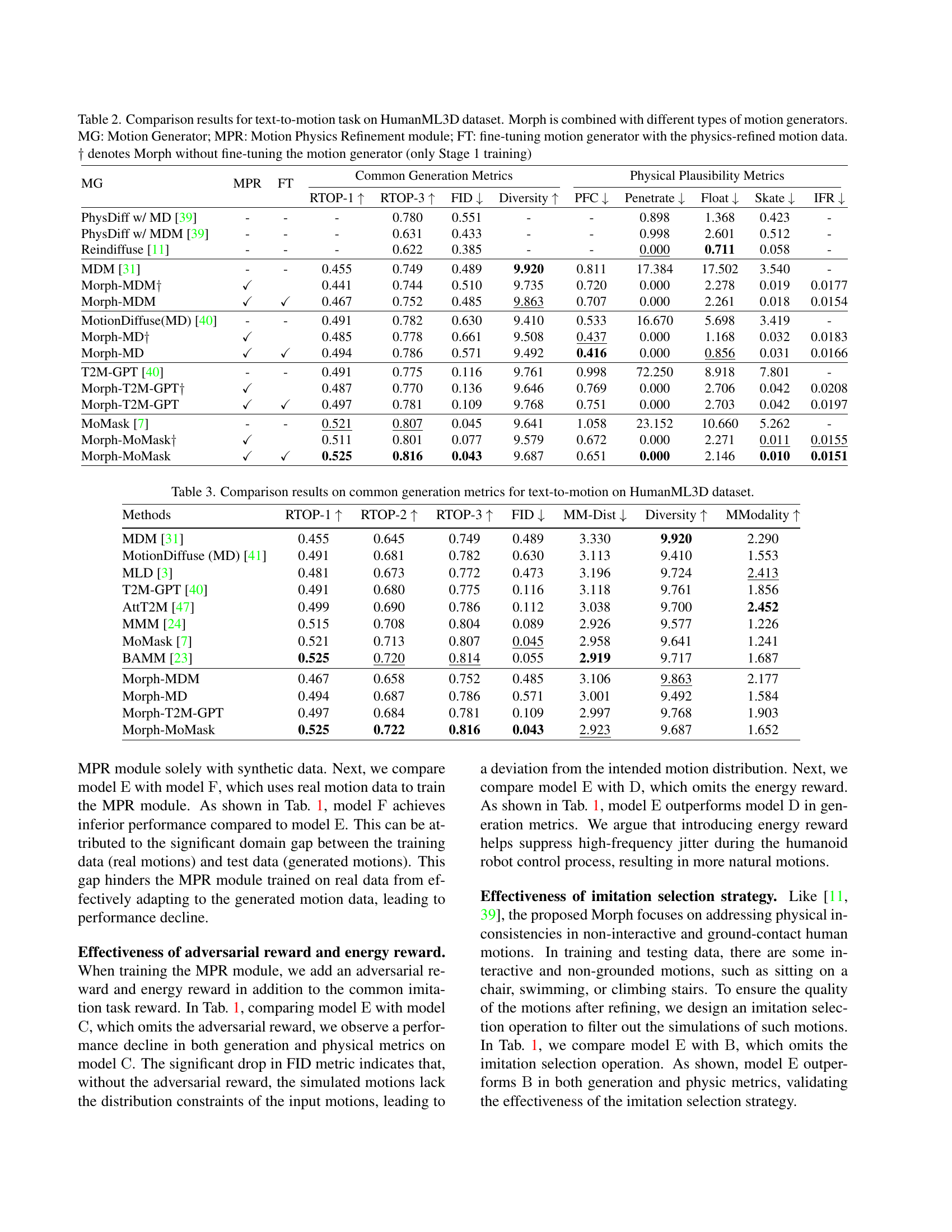
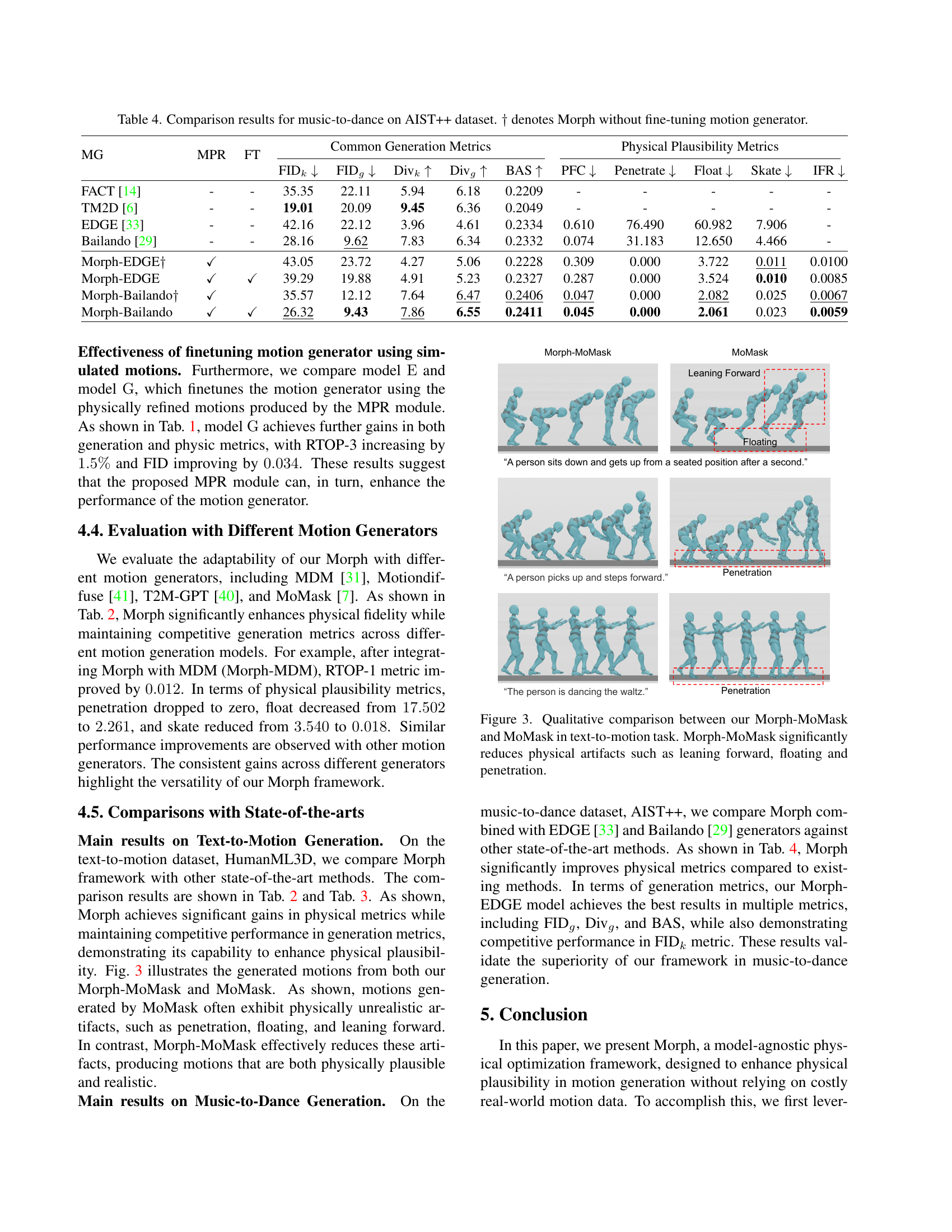
🔼 This table presents a comparison of different models’ performance on the text-to-motion task using the HumanML3D dataset. The models are categorized by their underlying motion generation techniques (e.g., diffusion-based, autoregressive) and whether they incorporate Morph, a physics-based optimization framework. Metrics include standard generation quality scores (RTOP-1, RTOP-3, FID, Diversity) as well as physical plausibility measures (PFC, Penetration, Float, Skate, IFR). The table shows how adding Morph improves physical accuracy without significantly sacrificing overall generation quality. Results are shown both with and without the fine-tuning stage (FT) of Morph, highlighting the impact of this enhancement.
read the caption
Table 2: Comparison results for text-to-motion task on HumanML3D dataset. Morph is combined with different types of motion generators. MG: Motion Generator; MPR: Motion Physics Refinement module; FT: fine-tuning motion generator with the physics-refined motion data. ††\dagger† denotes Morph without fine-tuning the motion generator (only Stage 1 training)

🔼 This table presents a quantitative comparison of various text-to-motion generation models on the HumanML3D dataset. The models are evaluated using several common metrics assessing the quality and diversity of the generated motions. These metrics include RTOP-1, RTOP-2, RTOP-3 (retrieval top-k accuracy), FID (Fréchet Inception Distance, measuring the difference between generated and real motion distributions), MM-Dist (multimodal distance, a measure of the spread of generated motions), Diversity (diversity of generated motions), and MModality (multimodality score, capturing the diversity of motion styles). The table allows for a direct comparison of the performance of different models in generating human motions from textual descriptions.
read the caption
Table 3: Comparison results on common generation metrics for text-to-motion on HumanML3D dataset.

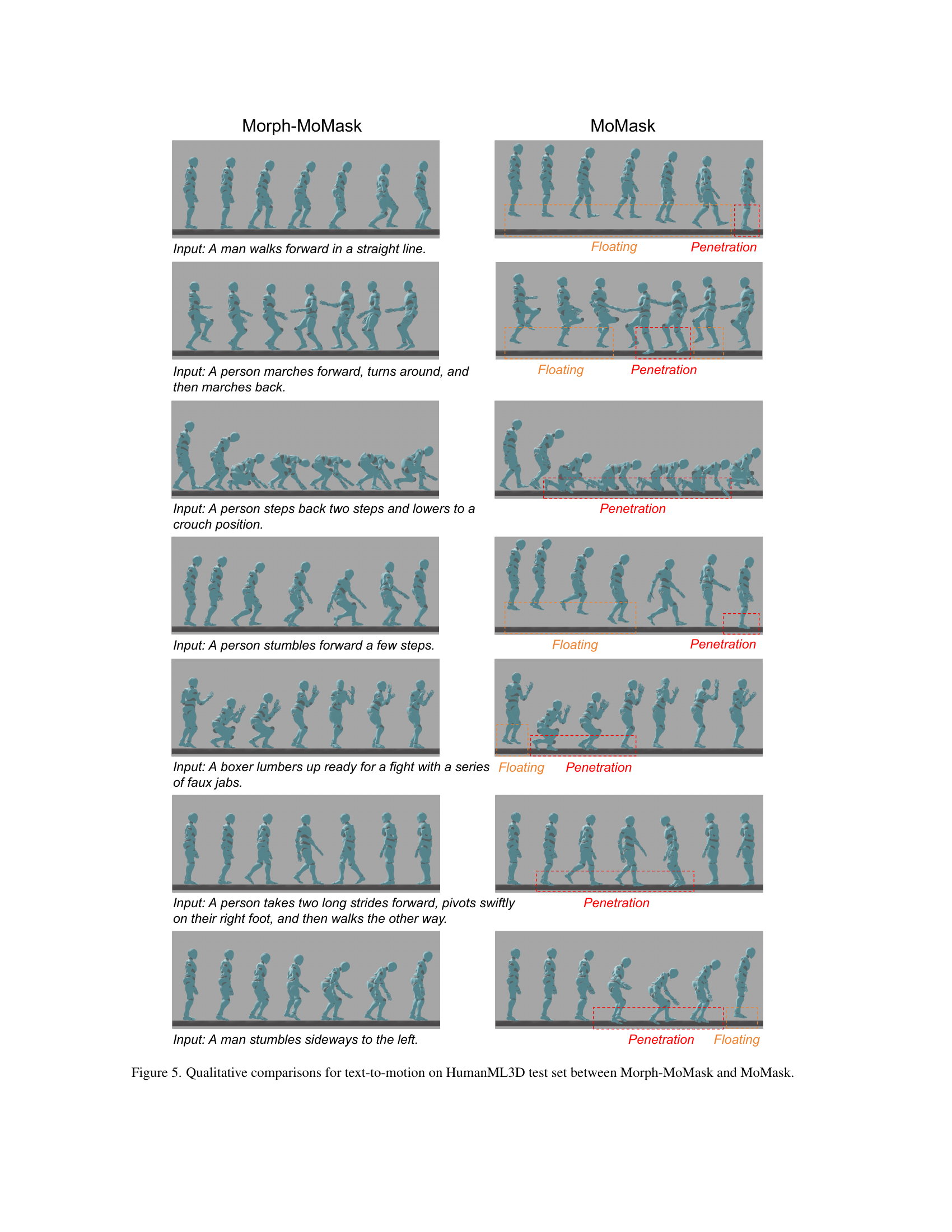
🔼 Figure 3 presents a qualitative comparison of human motion generation results between two models: Morph-MoMask and MoMask, for the text-to-motion task. The figure showcases several motion examples, each initiated by a textual description. For each example, the motion generated by both models is displayed. The comparison highlights how Morph-MoMask significantly mitigates common physical artifacts found in generated motions, such as characters floating above the ground, parts of the body penetrating the ground, and unnatural leaning postures, which are present in the MoMask output. This visualization serves to illustrate the effectiveness of the proposed Morph framework in enhancing physical plausibility during motion generation.
read the caption
Figure 3: Qualitative comparison between our Morph-MoMask and MoMask in text-to-motion task. Morph-MoMask significantly reduces physical artifacts such as leaning forward, floating and penetration.

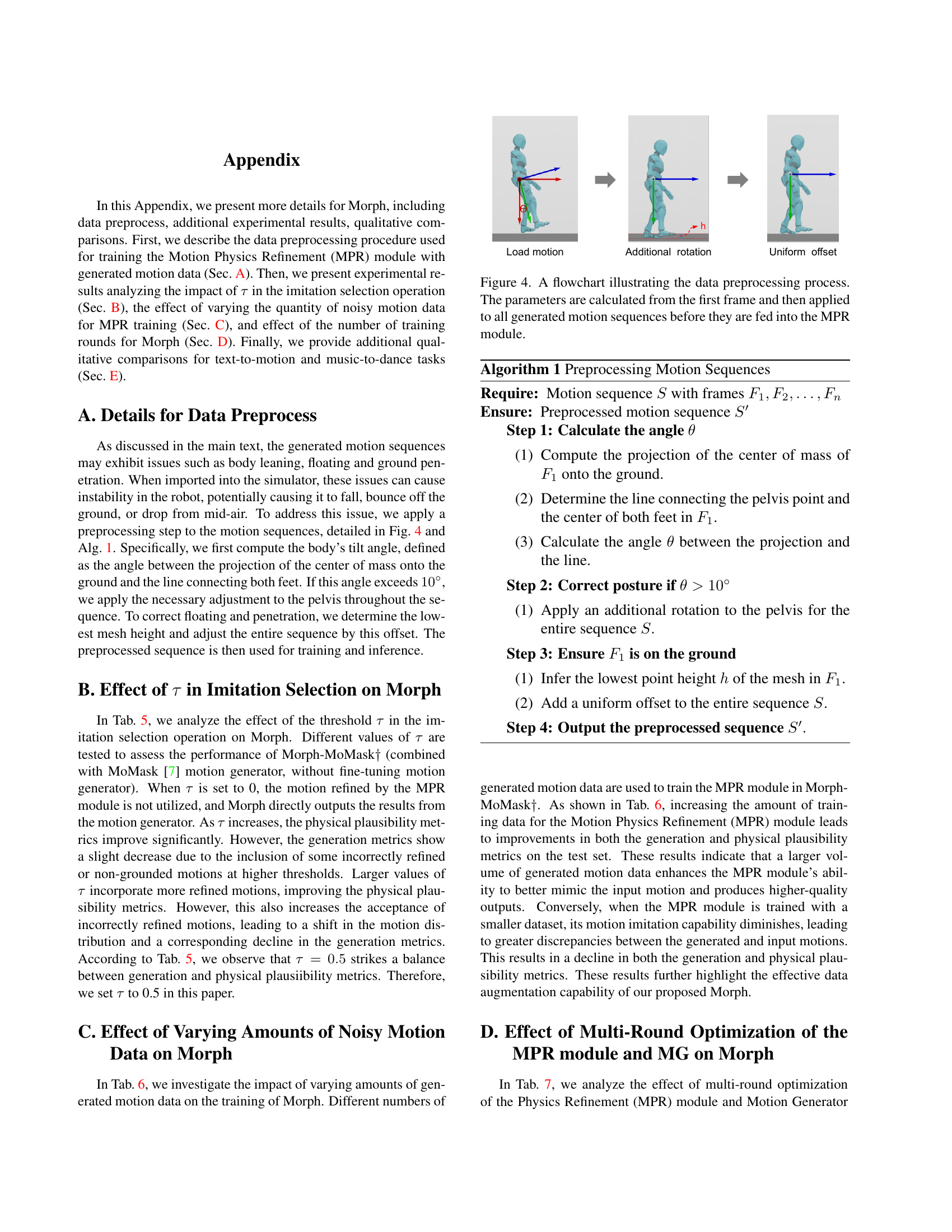
🔼 This flowchart details the preprocessing steps applied to generated motion sequences before they are input to the Motion Physics Refinement (MPR) module. The process begins by analyzing the first frame of each sequence to compute the body’s tilt angle and the lowest point of the mesh. Based on these parameters, adjustments are made to correct for postural issues (like leaning) and ground penetration or floating. These corrections ensure that the motions are physically plausible before being used by the MPR module. The final step is to apply the calculated parameters to all frames of the given sequence.
read the caption
Figure 4: A flowchart illustrating the data preprocessing process. The parameters are calculated from the first frame and then applied to all generated motion sequences before they are fed into the MPR module.
Full paper#