TL;DR#
Current methods for representing dynamic scenes struggle with accurately tracking and reconstructing surfaces that change topology (e.g., merging, splitting, appearing, disappearing). Existing techniques often compromise between tracking consistency and high-quality rendering, or require computationally expensive solutions. Furthermore, accurate handling of fast movements or large deformations is challenging.
GSTAR overcomes these limitations by employing a novel approach that combines meshes with Gaussians, enabling both robust tracking and photorealistic rendering. A key innovation is the adaptive unbinding of Gaussians from the mesh in regions with topology changes. This allows for the creation of new surfaces based on unbound Gaussians. The method also incorporates a surface-based scene flow to improve the robustness of initialization and tracking between frames. The experimental results demonstrate GSTAR’s superiority over existing approaches in terms of accuracy and rendering quality.
Key Takeaways#
Why does it matter?#
This paper is important because it presents GSTAR, a novel method that significantly advances the state-of-the-art in dynamic scene reconstruction by addressing the limitations of existing methods in handling topology changes. This is highly relevant to current research trends in computer vision, graphics, and robotics, opening avenues for applications in areas such as visual effects, markerless motion capture, and human-robot interaction. The robust tracking and high-quality photorealistic rendering capabilities of GSTAR make it a valuable tool for researchers working in these areas.
Visual Insights#

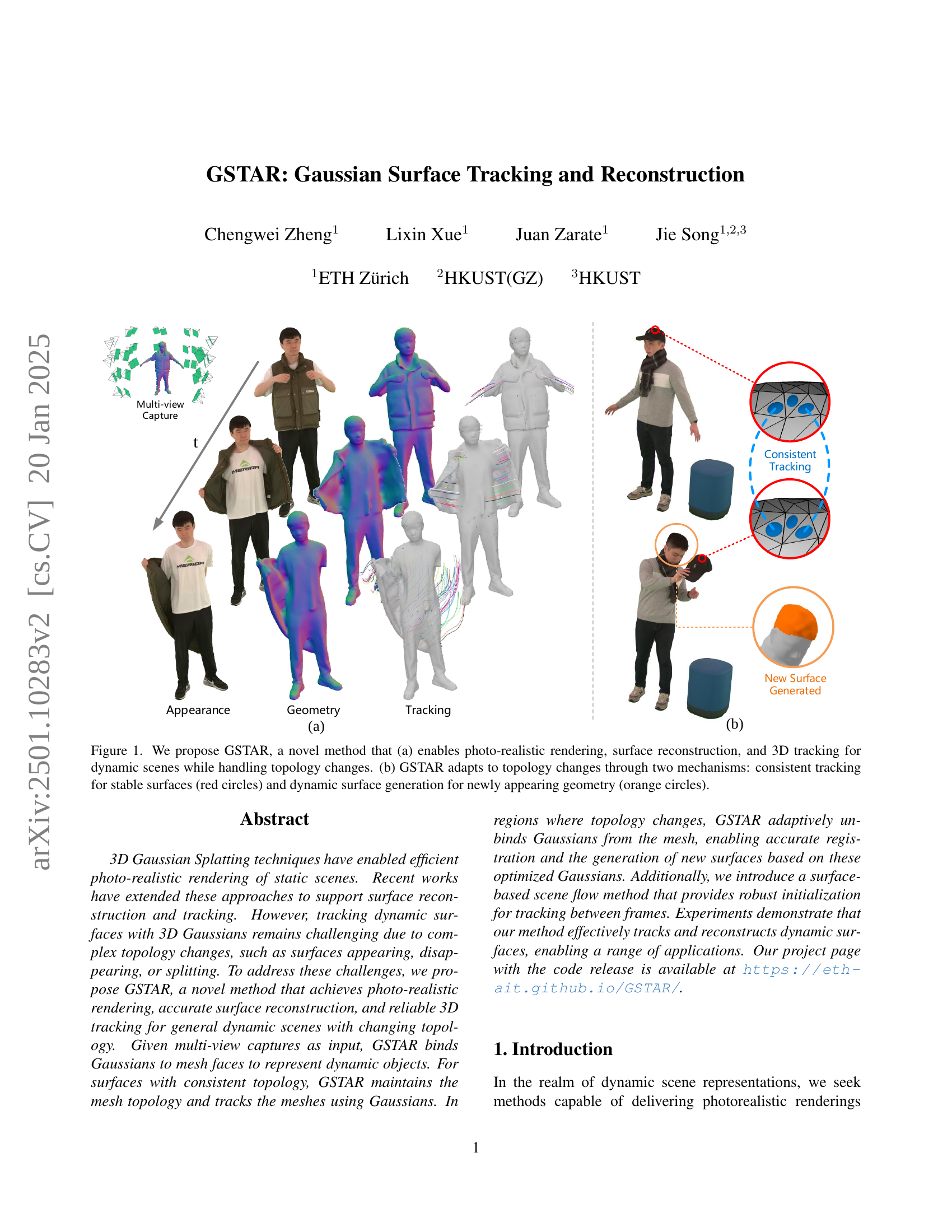
🔼 Figure 1 demonstrates the capabilities of the proposed GSTAR method. (a) showcases its ability to perform photorealistic rendering, reconstruct surfaces, and track 3D objects in dynamic scenes, all while handling topological changes such as surfaces appearing, disappearing, or splitting. (b) provides a more detailed explanation of how GSTAR manages these topological changes through two key processes: consistent tracking of existing surfaces (shown as red circles), and the generation of new surfaces for any newly appearing geometry (orange circles). This two-pronged approach ensures robust and accurate tracking even in complex dynamic environments.
read the caption
Figure 1: We propose GSTAR, a novel method that (a) enables photo-realistic rendering, surface reconstruction, and 3D tracking for dynamic scenes while handling topology changes. (b) GSTAR adapts to topology changes through two mechanisms: consistent tracking for stable surfaces (red circles) and dynamic surface generation for newly appearing geometry (orange circles).
| Method | Appearance | Geometry | Tracking | ||||
| PSNR | SSIM | LPIPS | CD | F-Score | 3D ATE | 2D ATE | |
| HumanRF [17] | 30.59 | 0.947 | 0.128 | 0.284 | 0.968 | - | - |
| Dynamic 3D Gaussians [26] | 27.61 | 0.905 | 0.214 | 1.113 † | 0.733 † | 3.15 | 13.84 |
| PhysAvatar-general [50] | 22.69 | 0.893 | 0.216 | 1.372 | 0.793 | 12.94 | 56.95 |
| PhysAvatar-SMPLX [50] | 24.50 | 0.908 | 0.193 | 0.625 | 0.837 | 8.98 | 39.61 |
| 2D Gaussian Splatting [16] | 30.17 | 0.938 | 0.155 | 0.699 | 0.946 | - | - |
| GSTAR w/o IR input | 30.05 | 0.946 | 0.110 | 0.335 | 0.960 | 0.671 | 3.02 |
| GSTAR (Ours) | 31.87 | 0.952 | 0.102 | 0.237 | 0.980 | 0.452 | 2.03 |
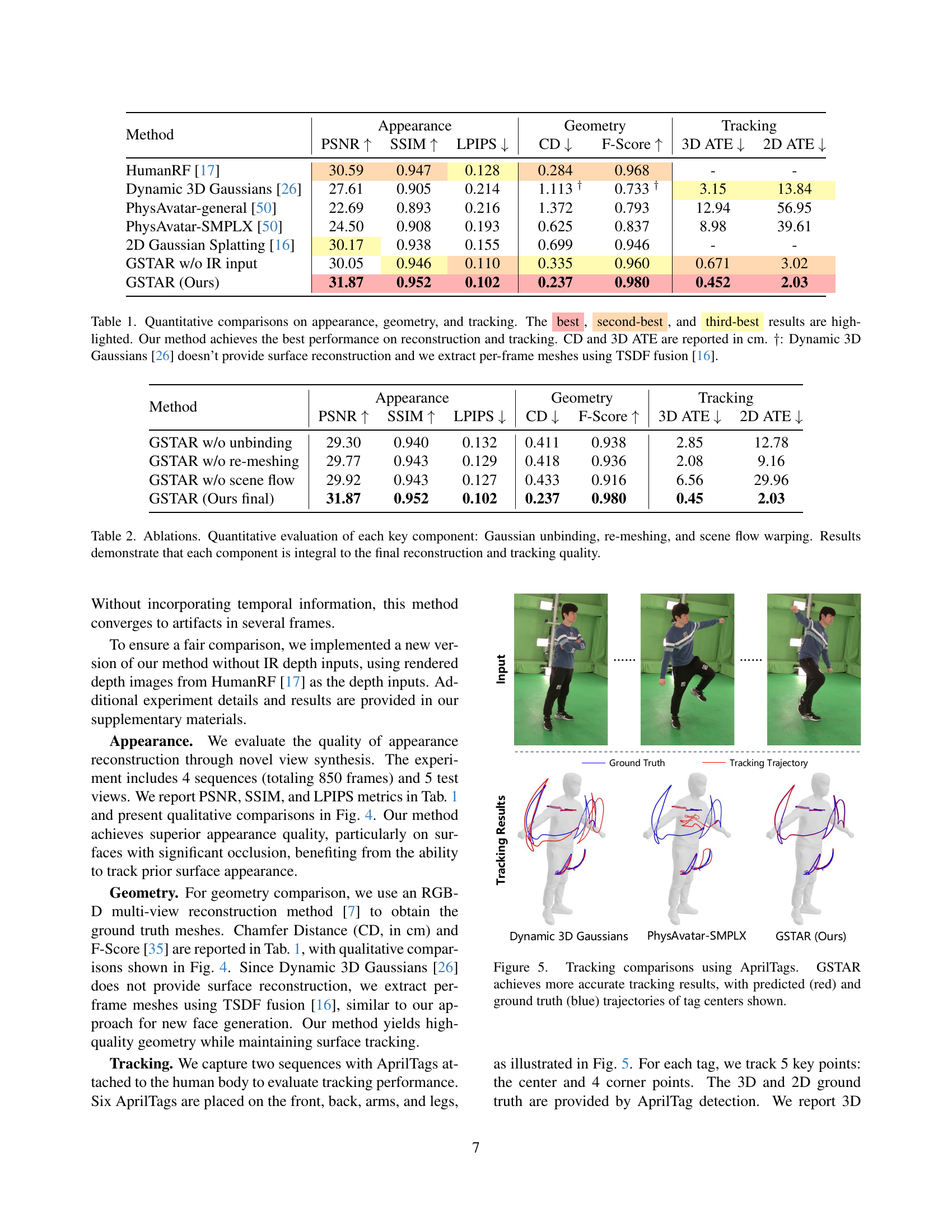
🔼 Table 1 presents a quantitative comparison of different methods for 3D scene reconstruction and tracking, focusing on appearance, geometry, and tracking accuracy. The metrics used include PSNR, SSIM, LPIPS for appearance; CD (Chamfer Distance) and F-Score for geometry; and 3D and 2D ATE (Average Trajectory Error) for tracking. The table highlights the best performing method across all metrics, with our proposed GSTAR method showing superior performance in reconstruction and tracking, especially when compared to methods that do not inherently provide surface reconstruction. Note that Dynamic 3D Gaussians required supplemental processing to extract meshes.
read the caption
Table 1: Quantitative comparisons on appearance, geometry, and tracking. The best, second-best, and third-best results are highlighted. Our method achieves the best performance on reconstruction and tracking. CD and 3D ATE are reported in cm. ††{\dagger}†: Dynamic 3D Gaussians [26] doesn’t provide surface reconstruction and we extract per-frame meshes using TSDF fusion [16].
In-depth insights#
Gaussian Surface Tracking#
Gaussian surface tracking, as discussed in the research paper, presents a novel approach to 3D scene representation and tracking that leverages the strengths of both mesh-based and Gaussian-based methods. The core idea is to bind Gaussians to mesh faces, providing a robust and efficient way to represent dynamic objects and their evolution. This combined representation enables photorealistic rendering due to the explicit nature of Gaussians, while maintaining accuracy in geometry through mesh tracking. Handling topology changes is a key challenge addressed through mechanisms that adaptively unbind Gaussians from the mesh in areas where topology alters, allowing for the accurate generation of new surfaces. This dynamic binding/unbinding process, coupled with a surface-based scene flow for robust initialization, enables accurate reconstruction and tracking even in complex scenes with significant topological changes. The method’s ability to seamlessly blend fixed-topology tracking with dynamic surface generation represents a key advance over existing techniques which often struggle to balance consistency and adaptability in dynamic 3D modelling.
Topology-Adaptive Mesh#
A topology-adaptive mesh is a crucial element in handling dynamic scenes with changing surface geometry. Its adaptability is key to addressing the challenges posed by surfaces appearing, disappearing, splitting, or merging during the tracking process. A rigid mesh structure would fail to represent these changes accurately, leading to reconstruction errors and inconsistencies. The algorithm would need mechanisms to detect topology changes—possibly through analysis of surface normals, displacements, or reconstruction uncertainties. Then, local mesh operations (insertion/deletion of vertices/faces) would dynamically adjust the mesh structure, ensuring that the mesh conforms to the evolving geometry. This requires clever data structures and algorithms to manage efficient updates without compromising computational efficiency. The algorithm needs a method for determining when to create, adjust, or delete mesh elements, while maintaining consistency and preventing fragmentation of the mesh. Efficient management of Gaussian surface representation—if used—would be key to smooth transitions during topological changes, avoiding visual artifacts. This involves carefully integrating the mesh updates with the Gaussian surface adjustments for seamless integration.
Scene Flow for Robust Init#
The proposed ‘Scene Flow for Robust Init’ method is a crucial preprocessing step that significantly enhances the accuracy and robustness of the Gaussian Surface Tracking and Reconstruction (GSTAR) system. By leveraging optical flow and depth information, it generates a 3D scene flow field, effectively warping the previous frame’s Gaussian Surface representation to provide a highly accurate initialization for the current frame. This strategy is particularly beneficial in handling dynamic scenes with large or rapid deformations, addressing a common challenge in dynamic scene reconstruction where simply using the previous frame’s state would lead to significant drift and error. The process’s robustness is further bolstered by incorporating consistency checks and surface-aware smoothing. These additions filter out unreliable optical flow estimations and refine the scene flow field, resulting in an initialization that better matches the current frame’s geometry, promoting smoother, more accurate tracking and reconstruction throughout the sequence. This method’s effectiveness is evident in the ablation study, with a noticeable decline in performance when this initialization step is removed, highlighting its importance in achieving high-quality and consistent results in dynamic environments.
Ablation Study Analysis#
An ablation study systematically removes components of a model to assess their individual contributions. In this context, it would reveal the impact of key elements like Gaussian unbinding, surface re-meshing, and scene flow warping on the overall performance of the GSTAR system. By disabling each component in turn, the study quantifies the effect on metrics such as PSNR, SSIM, LPIPS, CD, F-score, and ATEs (both 2D and 3D). Significant drops in performance when a component is removed highlight its importance. For example, a considerable decrease in accuracy when unbinding is disabled indicates that this mechanism is crucial for handling topological changes. Similarly, substantial reductions in tracking metrics when scene flow warping is excluded demonstrate its vital role in accurate initialisation and motion tracking. A thoughtful analysis of these results would not only confirm the effectiveness of the chosen techniques but also provide insights into potential future improvements and limitations of the approach. The ablation study allows for a deeper understanding of individual contributions of each element, facilitating future refinements by targeting the specific components which yield most improvement.
Future Work: Complex Scenes#
Future work on handling complex scenes for dynamic 3D reconstruction using Gaussian Surface Tracking and Reconstruction (GSTAR) should prioritize several key areas. Robustly handling occlusions is crucial, as current methods might struggle with significant or prolonged obstructions. Improved scene flow estimation is needed to reliably initialize tracking in scenes with rapid, large-scale motions or highly dynamic elements that challenge current 2D optical flow methods. Addressing varying illumination and its effect on Gaussian parameter estimation is important. Adapting the system to handle diverse surface materials beyond the current scope will be key for broader applicability. Efficiently managing large-scale scenes and potentially leveraging hierarchical or multi-resolution techniques is needed to reduce computation. Finally, exploring the potential for interactive editing and manipulation of dynamic 3D reconstructions within this framework would be a valuable advancement.
More visual insights#
More on figures

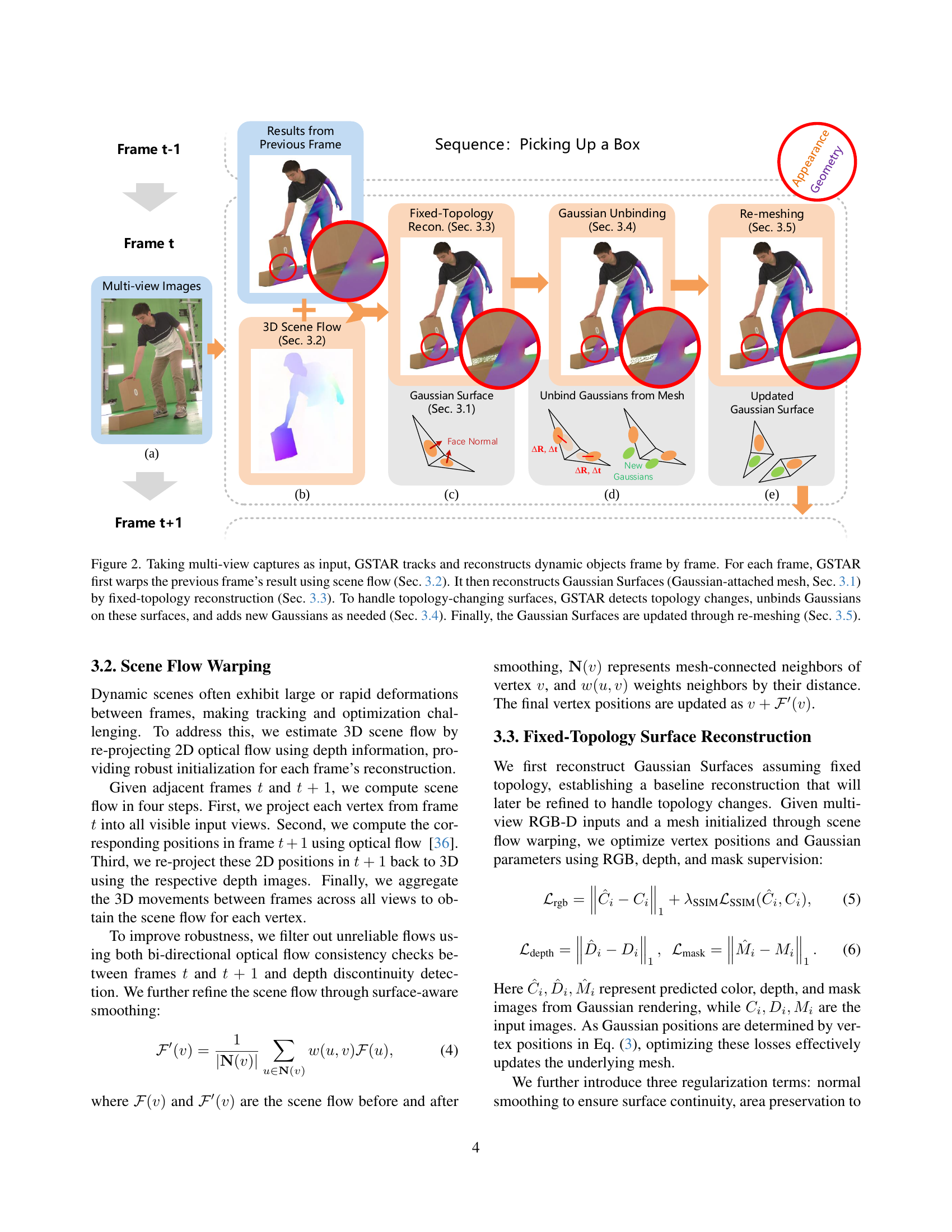
🔼 This figure illustrates the GSTAR method’s pipeline for tracking and reconstructing dynamic objects from multi-view video data. Starting from a previous frame’s results (a), scene flow warping (Sec 3.2) initializes the current frame’s geometry (b). Next, fixed-topology reconstruction (Sec 3.3) creates Gaussian Surfaces—meshes with bound Gaussians (c). The system detects topology changes, unbinds Gaussians from the affected surfaces (Sec 3.4, d), generates new Gaussians to model new geometry, and finally updates the Gaussian Surfaces via remeshing (Sec 3.5, e). This ensures both consistent tracking of existing surfaces and accurate reconstruction of new or altered ones, as demonstrated by the example of picking up a box.
read the caption
Figure 2: Taking multi-view captures as input, GSTAR tracks and reconstructs dynamic objects frame by frame. For each frame, GSTAR first warps the previous frame’s result using scene flow (Sec. 3.2). It then reconstructs Gaussian Surfaces (Gaussian-attached mesh, Sec. 3.1) by fixed-topology reconstruction (Sec. 3.3). To handle topology-changing surfaces, GSTAR detects topology changes, unbinds Gaussians on these surfaces, and adds new Gaussians as needed (Sec. 3.4). Finally, the Gaussian Surfaces are updated through re-meshing (Sec. 3.5).

🔼 Figure 3 illustrates the mesh update process in GSTAR, a method for dynamic surface tracking and reconstruction. Panel (a) visualizes the ‘unbinding weights’ calculated by Equation 10. These weights highlight regions of the mesh where topological changes are occurring; higher weights (represented by red) indicate a greater likelihood of changes. Panel (b) demonstrates the connection between the original mesh (from the previous frame) and newly generated surfaces. The blue dotted lines show how vertices from both the old and new meshes are connected, ensuring a continuous and consistent surface representation across frames.
read the caption
Figure 3: Details of the mesh update process. (a) Visualization of unbinding weights defined in Eq. 10, where red indicates high weights in topology-changing regions. (b) Mesh connection process between original and new surfaces, with blue dotted lines showing vertex correspondences.

🔼 Figure 4 presents a comparison of appearance and geometry reconstruction results from several methods, including the proposed GSTAR method, on a dynamic scene. The figure visually demonstrates that while other state-of-the-art methods such as Dynamic 3D Gaussians and PhysAvatar produce suboptimal results (poor appearance or geometry), and HumanRF and 2DGS fail to handle heavy occlusions due to a lack of tracking capabilities, GSTAR achieves high-quality reconstruction with effective tracking of dynamic objects.
read the caption
Figure 4: Comparisons of appearance and geometry reconstruction. Dynamic 3D Gaussians [26] and PhysAvatar [50] yield suboptimal reconstruction results. HumanRF [17] and 2DGS [16], lacking tracking capabilities, struggle under heavy occlusion. In contrast, GSTAR provides high-quality reconstruction while supporting tracking. Additional comparisons are provided in our supplementary materials.

🔼 This figure compares the tracking accuracy of different methods using AprilTags. AprilTags are physical markers with unique identifiers, making them ideal for evaluating tracking performance. The figure visually shows the predicted trajectories (in red) generated by each method against the ground truth trajectories (in blue). By comparing the closeness of the red and blue lines for each AprilTag across all methods, one can assess the accuracy and robustness of each tracking algorithm. GSTAR’s superior tracking accuracy is visually apparent.
read the caption
Figure 5: Tracking comparisons using AprilTags. GSTAR achieves more accurate tracking results, with predicted (red) and ground truth (blue) trajectories of tag centers shown.
Full paper#