TL;DR#
Current text-to-3D generation methods struggle to produce physically realistic models that can stand without support, hindering their usability in various applications. This is largely due to a focus on visual realism over physical properties. This limits the use of generated models in applications where stability is crucial, such as robotics and 3D printing.
Atlas3D tackles this issue by integrating a novel differentiable simulation-based loss function with physically inspired regularization into existing text-to-3D frameworks. This ensures the generated 3D models adhere to physical laws, such as gravity, resulting in self-supporting, stable structures. The approach’s effectiveness is demonstrated through extensive generation tasks and validation in both simulated and real-world environments, showcasing its significant contribution to creating practical and usable 3D models.
Key Takeaways#
Why does it matter?#
This paper is important because it addresses a critical limitation in current text-to-3D generation methods: the lack of physical constraints. By introducing a novel approach that ensures the creation of stable, self-supporting 3D models, the research opens up exciting possibilities for applications in interactive gaming, embodied AI, and robotics. The developed framework’s ease of implementation and ability to enhance existing tools also significantly contributes to the field’s advancement.
Visual Insights#

🔼 This figure shows a comparison of 3D models generated with and without the Atlas3D framework. The (a) section displays models generated using Atlas3D, demonstrating their ability to stand upright and stable on a flat surface. In contrast, (b) shows models generated by other existing methods, illustrating that they tend to fall over, highlighting the improvement in stability achieved by Atlas3D.
read the caption
Figure 1: Simulation in ABD [27]: (a) 3D models generated from our Atlas3D framework can stand steadily on the ground; (b) those generated from existing methods tend to fall over.

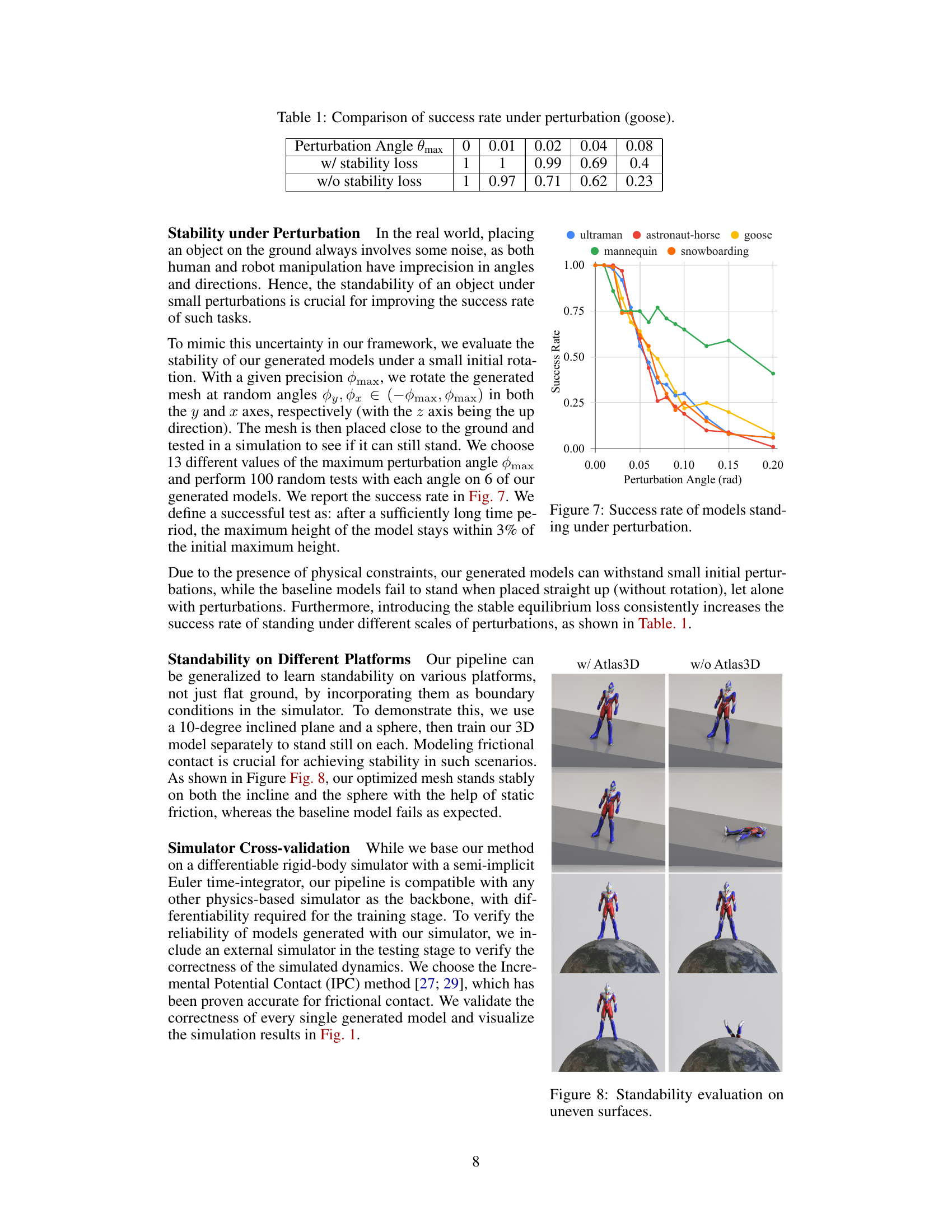
🔼 This table presents the success rates of models standing under various levels of perturbation (measured by the maximum perturbation angle θ_max). The success rate is determined by whether the model can maintain its height within 3% of the initial maximum height after simulation for a sufficiently long time. The table compares the success rates with and without the stability loss applied during training. The results show a significant decrease in success rate when the stability loss is not used, indicating the importance of the stability loss in ensuring robustness under perturbation.
read the caption
Table 1: Comparison of success rate under perturbation (goose).
In-depth insights#
Physically-Aware 3DGen#
Physically-aware 3D generation (3DGen) aims to transcend the limitations of traditional methods by integrating physical realism into the process. Existing text-to-3D models often prioritize visual fidelity over physical plausibility, resulting in models that are visually appealing but unstable or impossible to fabricate. Physically-aware 3DGen addresses this by incorporating physics-based simulations or constraints during the generation process. This ensures that the resulting 3D models adhere to the laws of physics, such as gravity, stability, and collision detection. Key challenges involve developing efficient differentiable physics engines that can be integrated seamlessly into the generative model’s training process. Furthermore, balancing the computational cost of physical simulation with the need for high-quality 3D model generation is a critical consideration. Methods explored might include physics-based loss functions to guide the generation towards physically plausible results, or post-processing techniques to refine already-generated models. The successful development of physically-aware 3DGen promises significant advancements for applications such as robotics, gaming, and industrial design, enabling the creation of functional and realistic 3D objects directly from textual descriptions or other input modalities.
Atlas3D Framework#
The Atlas3D framework presents a novel approach to text-to-3D generation by explicitly integrating physical constraints into the model. This is a significant departure from existing methods, which primarily focus on visual realism without considering the physical stability or feasibility of the generated objects. Atlas3D enhances existing SDS-based text-to-3D tools by incorporating a differentiable physics-based loss function. This enables the model to learn and optimize for self-supporting 3D models that adhere to physical laws like gravity and friction. The framework’s plug-and-play nature allows for easy integration with various existing frameworks, either as a refinement step or post-processing module. Differentiable simulation, a core element of Atlas3D, is crucial to the optimization process, enabling gradients to be calculated and backpropagated, thereby improving both the model’s stability and visual fidelity. The resulting 3D models exhibit significantly improved stability, as validated through both simulations and real-world 3D printing experiments, showing its practical implications for various applications.
Differentiable Physics#
Differentiable physics is a rapidly evolving field that bridges the gap between traditional physics simulation and machine learning. By making physics simulations differentiable, meaning their outputs change smoothly with respect to inputs, we can directly incorporate them into gradient-based optimization processes. This opens up exciting possibilities. We can train neural networks to learn complex physical phenomena by using differentiable simulators as components of the loss function. This approach avoids the need for large, manually labelled datasets often required in traditional machine learning. The technique allows for seamless integration of physical realism into various applications, such as robotics, computer graphics, and scientific modelling, significantly improving the accuracy and fidelity of simulations. A key challenge lies in the computational cost of differentiable simulators, which can be demanding. Efficient algorithms and computational approaches are critical for widespread adoption. The development of differentiable physics also raises interesting theoretical questions. How do we balance the accuracy of physical models with the efficiency of the differentiable implementation? Furthermore, exploring the implications of differentiable physics for complex systems and emergent behaviour will drive progress in diverse fields.
Standability Metrics#
In assessing the physical stability of 3D-generated models, a robust and comprehensive set of standability metrics is crucial. These metrics should go beyond simple binary classifications (stable/unstable) and incorporate quantitative measures reflecting the model’s resistance to various perturbations. Key metrics could include the center of mass height relative to the base, the contact area with the supporting surface, and the moment of inertia. Additionally, metrics measuring the model’s response to simulated disturbances, such as pushes, pulls, or tilts, could provide insights into its stability. These dynamic simulations would provide a more holistic evaluation compared to static assessments. Furthermore, differentiable simulation allows for the seamless integration of physics-based losses directly into the model generation process, making the generation of physically plausible and self-supporting models more efficient and accurate. Standability metrics should be carefully calibrated using both simulated and real-world testing to ensure generalizability across different environments and manufacturing techniques. The development of such metrics is essential for advancing the field of physically constrained text-to-3D generation, ensuring the reliability and functionality of the resulting 3D models in both virtual and real-world applications.
Future of Atlas3D#
The future of Atlas3D looks promising, building upon its current capabilities. Improving the efficiency of the differentiable physics simulation is crucial; current methods are computationally expensive. Exploring alternative 3D representations beyond triangular meshes, perhaps using implicit surfaces or neural fields, could enhance both generation speed and geometric detail. Expanding the range of physical phenomena modeled beyond gravity, friction, and contact (e.g., elasticity, fluid dynamics) would allow for greater realism in simulated and fabricated objects. Integrating Atlas3D with more sophisticated text-to-image models would result in higher-quality textures and more nuanced geometry, and this integration also presents opportunities for exploring more expressive prompts. Finally, broadening the types of objects that Atlas3D can generate beyond rigid bodies would be a substantial advancement. Extending to flexible, deformable objects or even complex systems with articulated parts would open doors for new applications in animation, virtual reality, and robotics.
More visual insights#
More on figures

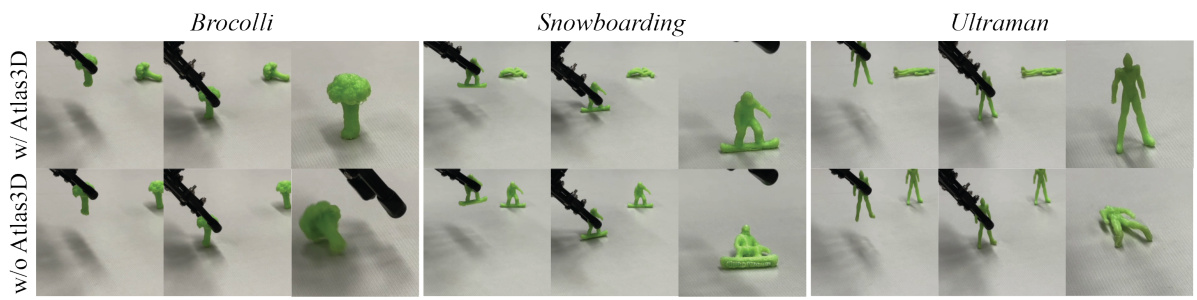
🔼 This figure shows the results of a 3D printing experiment. The top row displays figurines generated using the Atlas3D framework, which successfully stand upright after printing. The bottom row shows figurines generated without Atlas3D; these models are unstable and have fallen over. This visually demonstrates the effectiveness of Atlas3D in generating self-supporting 3D models.
read the caption
Figure 2: 3D-printed figurines created with Atlas3D stand stably, while those without Atlas3D have fallen down.

🔼 This figure illustrates the difference between stable and unstable equilibrium. A square, when slightly perturbed, will experience an increase in its center of mass height (H(xcom)), returning to its original position. This is a stable equilibrium. In contrast, an upside-down triangle, when perturbed, will have its center of mass height decrease, moving further away from its initial position. This represents an unstable equilibrium.
read the caption
Figure 3: 2D illustration of stable equilibrium and unstable equilibrium. (a) A square is stable as a small perturbation of φ increases in H(xcom); (b) An upside-down triangle is unstable as tilting decreases H(xcom).
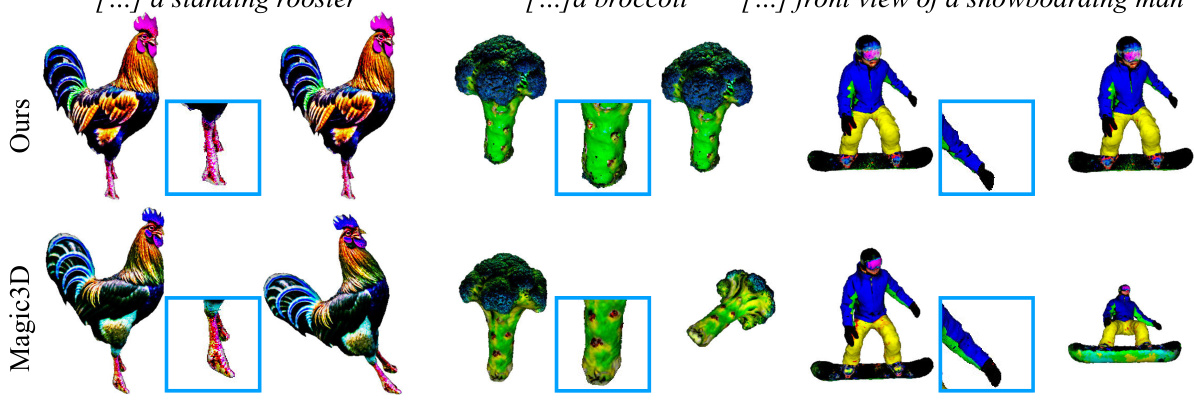
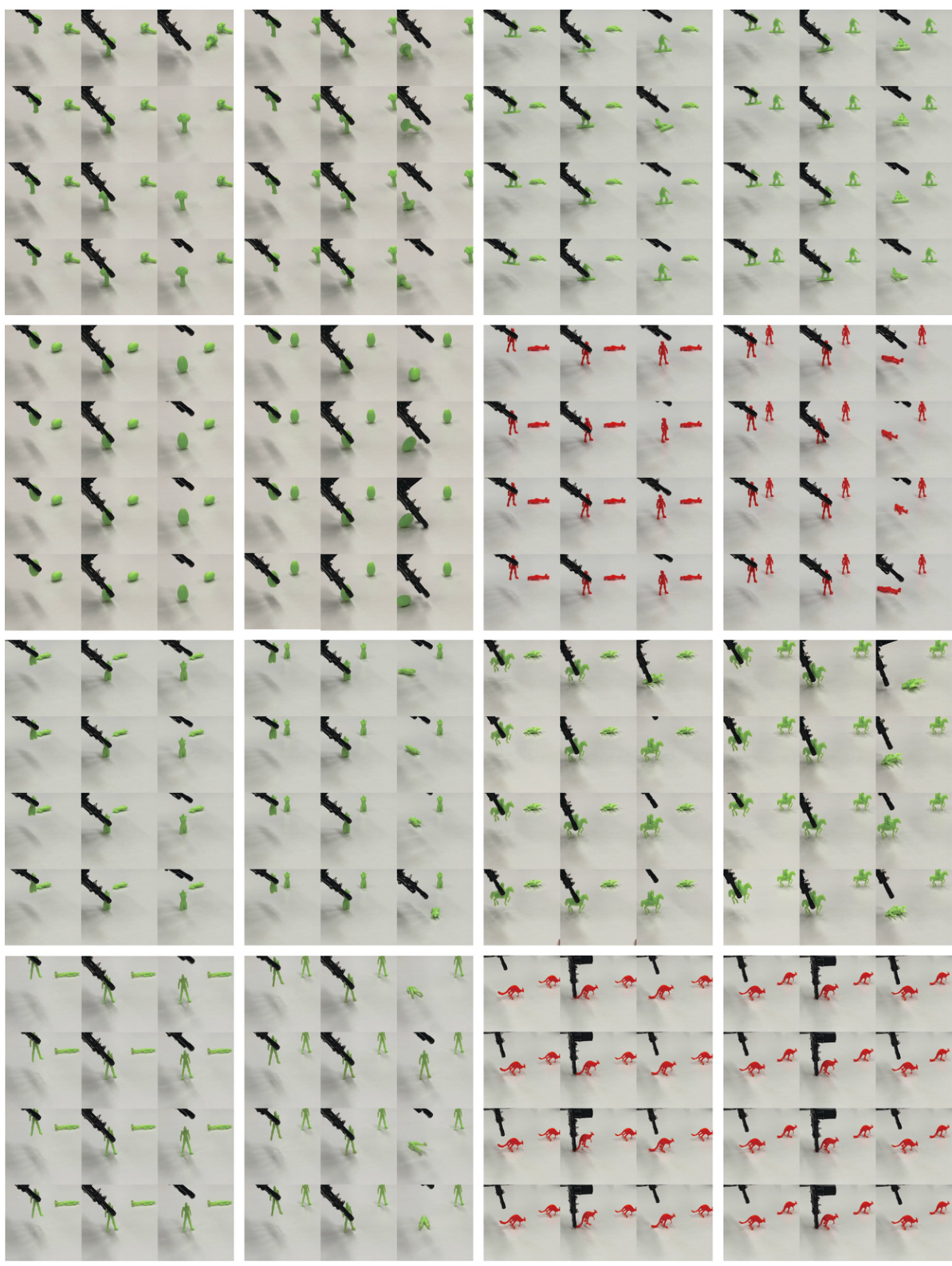
🔼 This figure compares the results of the proposed Atlas3D method with the Magic3D baseline method for generating 3D models from text prompts. The top row shows the results generated by Atlas3D, and the bottom row shows the results generated by Magic3D. The figure highlights how Atlas3D, by incorporating physics priors, generates self-supporting 3D models that can stand stably, unlike the Magic3D models which tend to topple over. Zoom-in views are included to emphasize detailed geometric differences between the two methods.
read the caption
Figure 4: Comparison with Magic3D [35] includes zoom-in views that highlight the detailed changes in geometry. Our method enhances Magic3D with physics priors to generate self-supporting meshes.

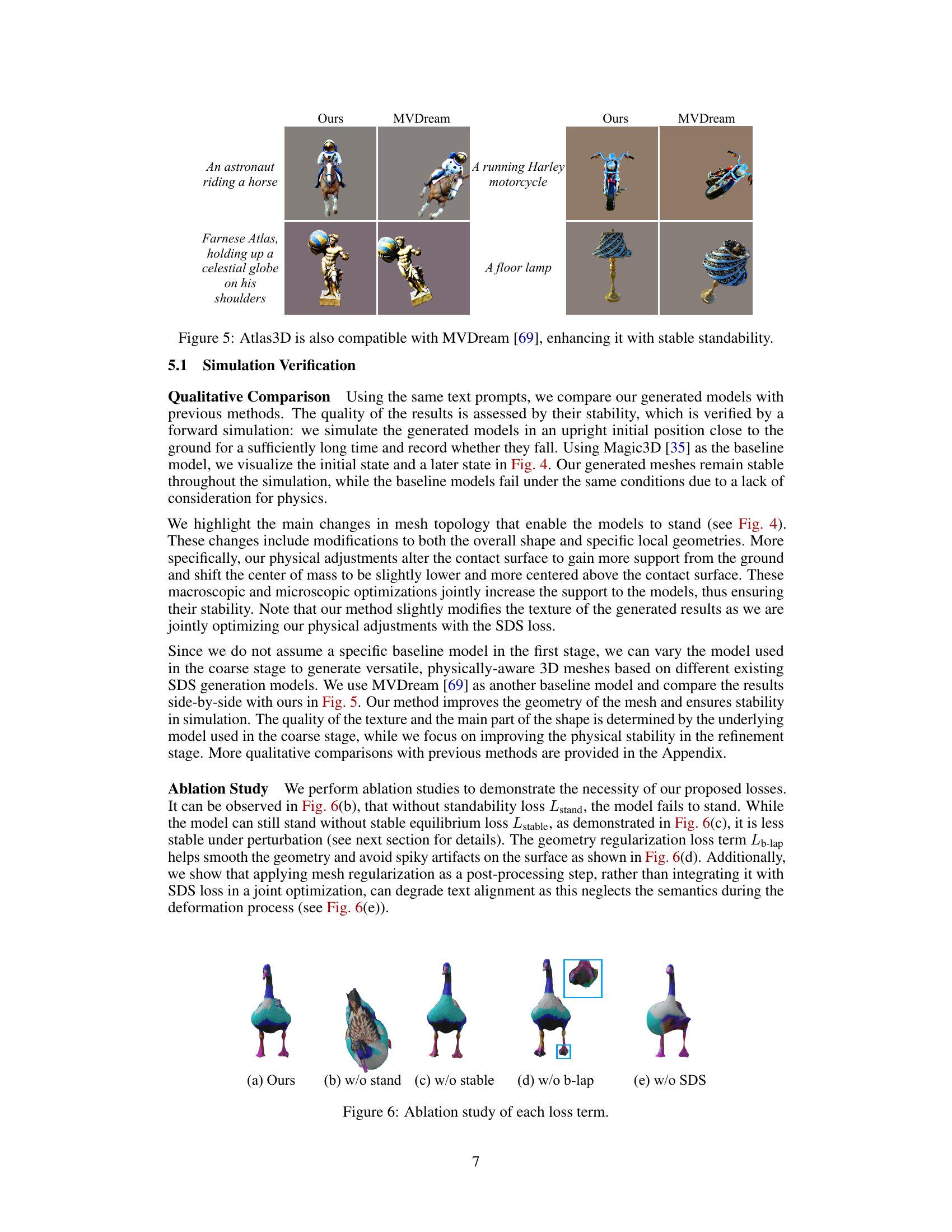
🔼 This figure shows a comparison of 3D models generated by Atlas3D and MVDream for four different prompts. The models generated using Atlas3D exhibit better stability and are able to stand upright, unlike the models generated by MVDream, which tend to fall over. This highlights Atlas3D’s ability to enhance existing text-to-3D generation methods by incorporating physical constraints to ensure the stability of generated 3D models.
read the caption
Figure 5: Atlas3D is also compatible with MVDream [69], enhancing it with stable standability.
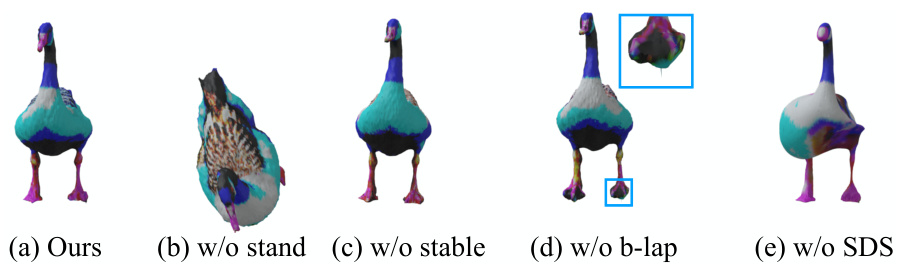
🔼 This figure shows the ablation study of each loss term used in the Atlas3D model. (a) shows the results with all loss terms included (Ours). (b) shows the results without the standability loss (w/o stand), demonstrating instability. (c) shows the results without the stable equilibrium loss (w/o stable), indicating reduced stability. (d) shows the results without the geometry regularization loss (w/o b-lap), highlighting the presence of spiky artifacts. (e) shows the results without the SDS loss (w/o SDS), demonstrating the negative effect on texture alignment.
read the caption
Figure 6: Ablation study of each loss term.
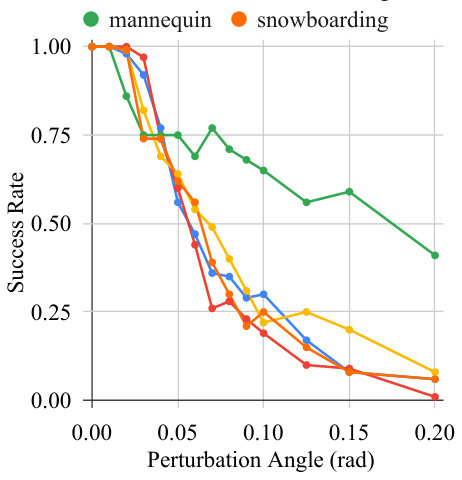
🔼 This figure shows the success rate of 3D models generated by the Atlas3D framework and a baseline method under various levels of initial perturbation. The x-axis represents the maximum angle (in radians) of random rotations applied to the models before simulation, simulating real-world imprecision. The y-axis shows the success rate, with higher values indicating greater stability. The Atlas3D models demonstrate significantly higher success rates across all perturbation levels compared to the baseline, highlighting their improved robustness.
read the caption
Figure 7: Success rate of models standing under perturbation.
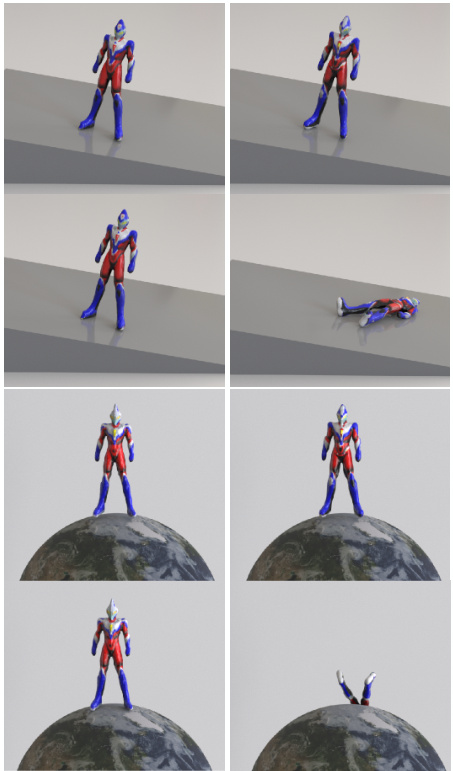
🔼 This figure shows a comparison of the stability of 3D models generated with and without Atlas3D on uneven surfaces, such as an inclined plane and a sphere. The models generated with Atlas3D demonstrate significantly better stability, remaining upright even on these challenging surfaces, while the models generated without Atlas3D fall over. This highlights the effectiveness of Atlas3D in ensuring physically plausible and self-supporting 3D models.
read the caption
Figure 8: Standability evaluation on uneven surfaces.
🔼 This figure shows a comparison of the standability of 3D printed models generated with and without Atlas3D on uneven surfaces. The models are subjected to different placements on an inclined plane and a sphere to test their robustness and stability. The results illustrate the significant improvement in stability achieved by integrating Atlas3D into the generation process.
read the caption
Figure 8: Standability evaluation on uneven surfaces.
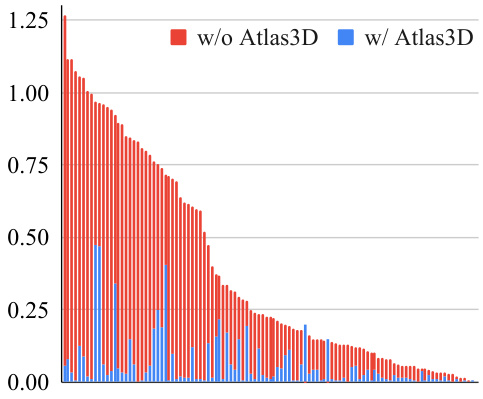
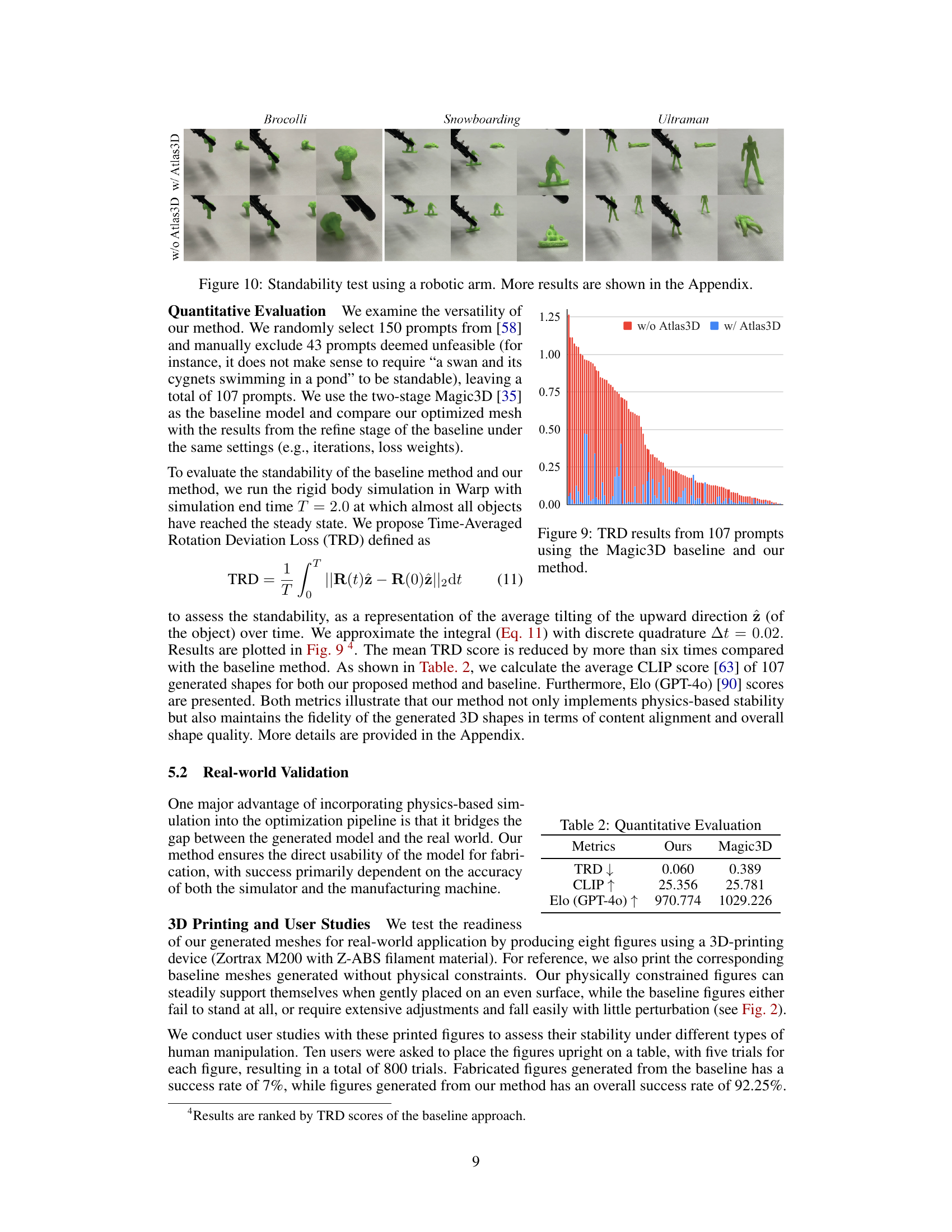
🔼 This figure shows a bar chart comparing the Time-Averaged Rotation Deviation Loss (TRD) scores for 107 prompts between the Magic3D baseline method and the Atlas3D method. The TRD score is a measure of how much the object rotates away from its initial upright position during a physics simulation. Lower scores indicate better stability. The chart demonstrates that Atlas3D significantly reduces the TRD score compared to the baseline, indicating improved stability of the generated 3D models.
read the caption
Figure 9: TRD results from 107 prompts using the Magic3D baseline and our method.
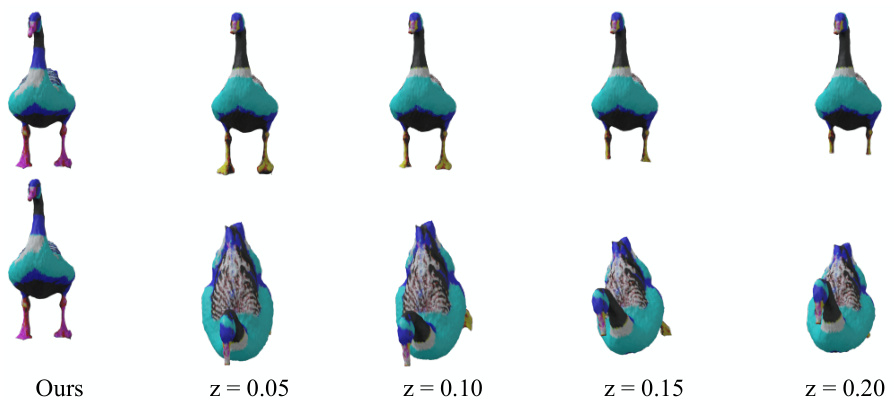
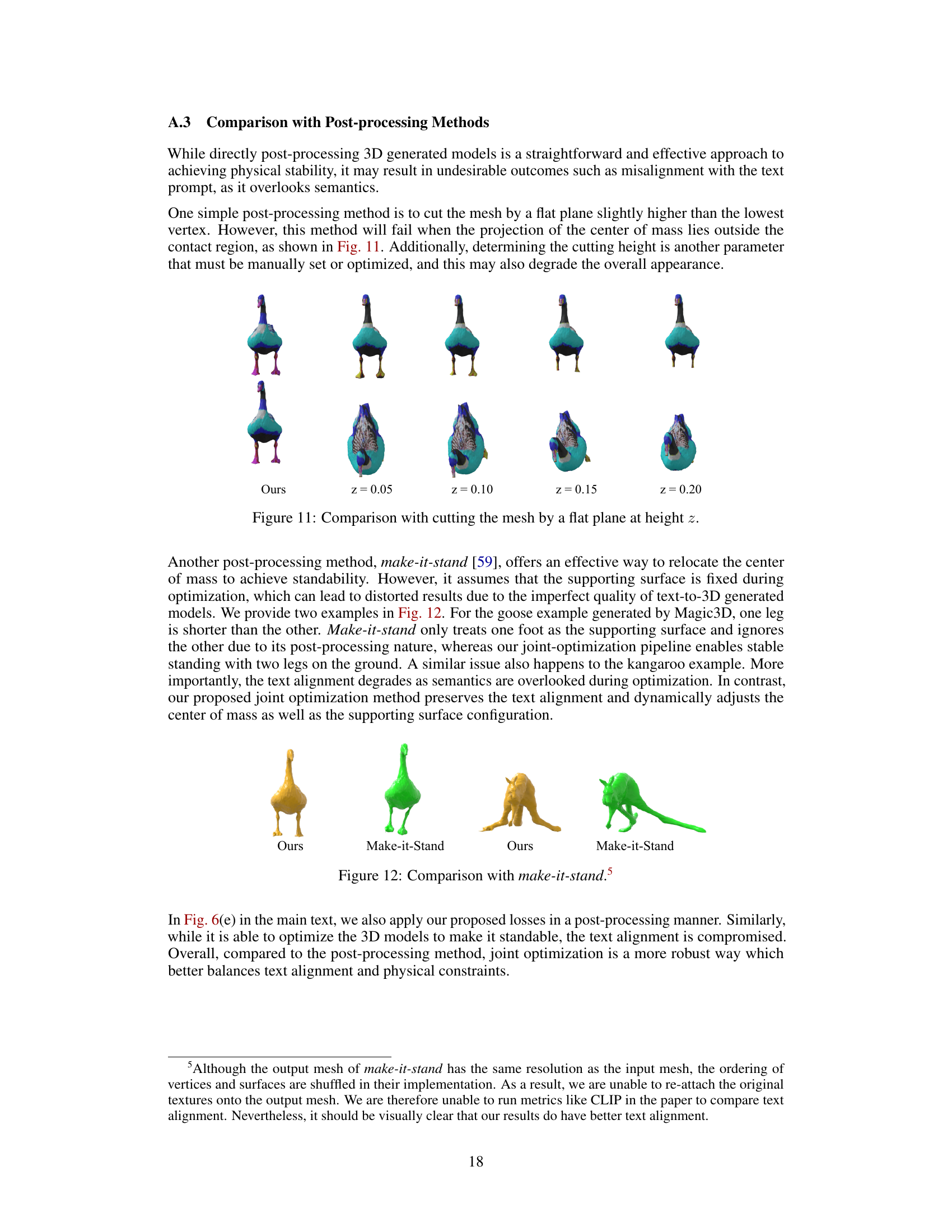
🔼 This figure compares the results of using the authors’ method with a post-processing method that cuts the mesh with a flat plane at different heights (z = 0.05, 0.10, 0.15, 0.20). The goal is to achieve standability by cutting off the lower part of the model. However, the results show that this method can lead to unsatisfactory outcomes such as misalignment with the text prompt, because it does not consider the semantic information of the generated model. The authors’ method, in contrast, jointly optimizes the geometry and physics to achieve standability, preserving the original text prompt.
read the caption
Figure 11: Comparison with cutting the mesh by a flat plane at height z.

🔼 This figure compares the results of the proposed Atlas3D method with the results from applying the make-it-stand post-processing method on 3D models generated by Magic3D. It shows that while make-it-stand can improve stability, it can lead to distorted results and loss of text alignment, in contrast to Atlas3D, which jointly optimizes for stability and text alignment.
read the caption
Figure 12: Comparison with make-it-stand.
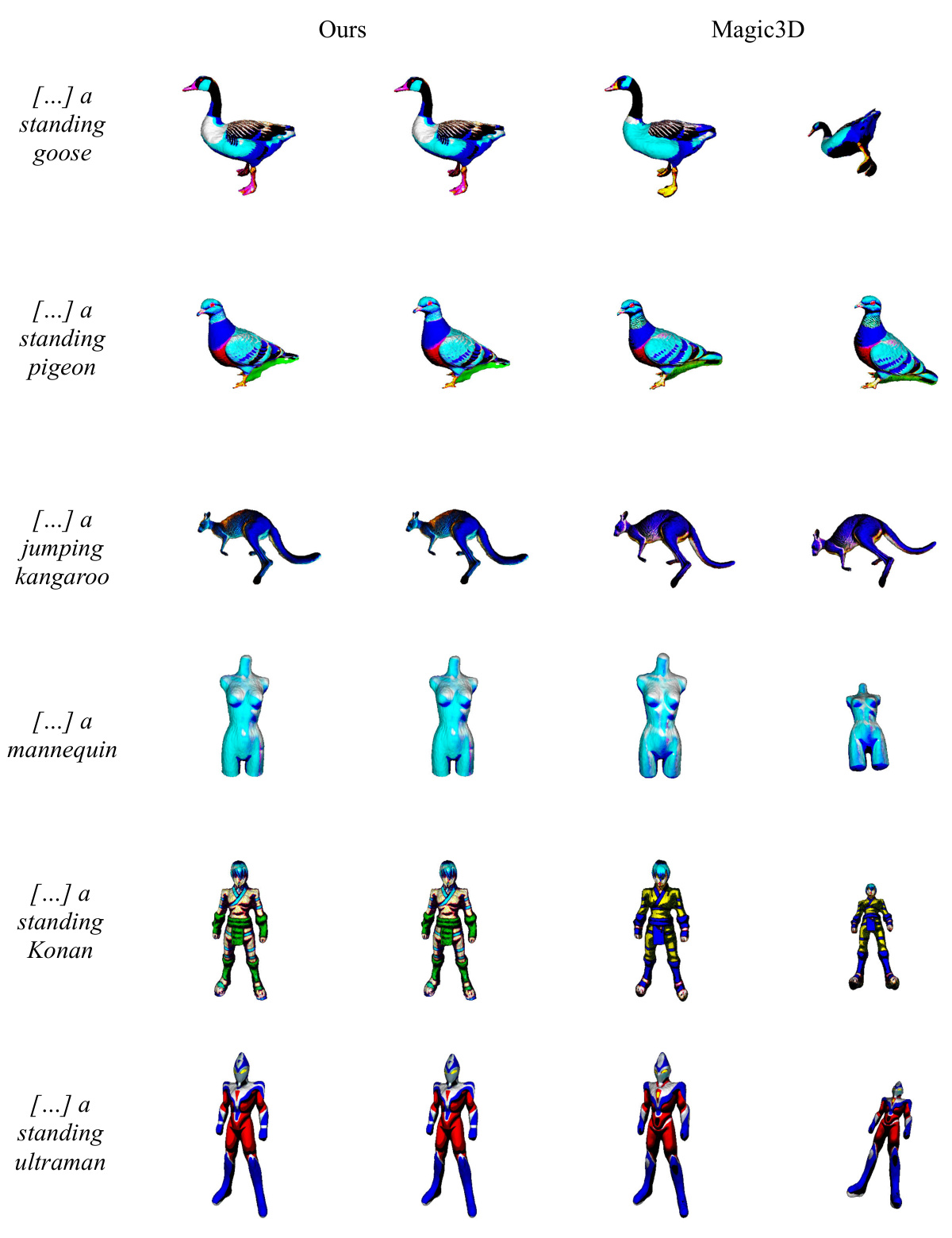
🔼 This figure compares the 3D models generated by the proposed Atlas3D method and the Magic3D baseline for six different prompts. The prompts are designed to generate objects that should be able to stand upright, such as a goose, a pigeon, and a mannequin. For each prompt, four images are shown, representing two different views generated by each method. The images show that Atlas3D generates more physically stable and realistic models that can better stand upright compared to Magic3D.
read the caption
Figure 13: More comparison with Magic3D baseline
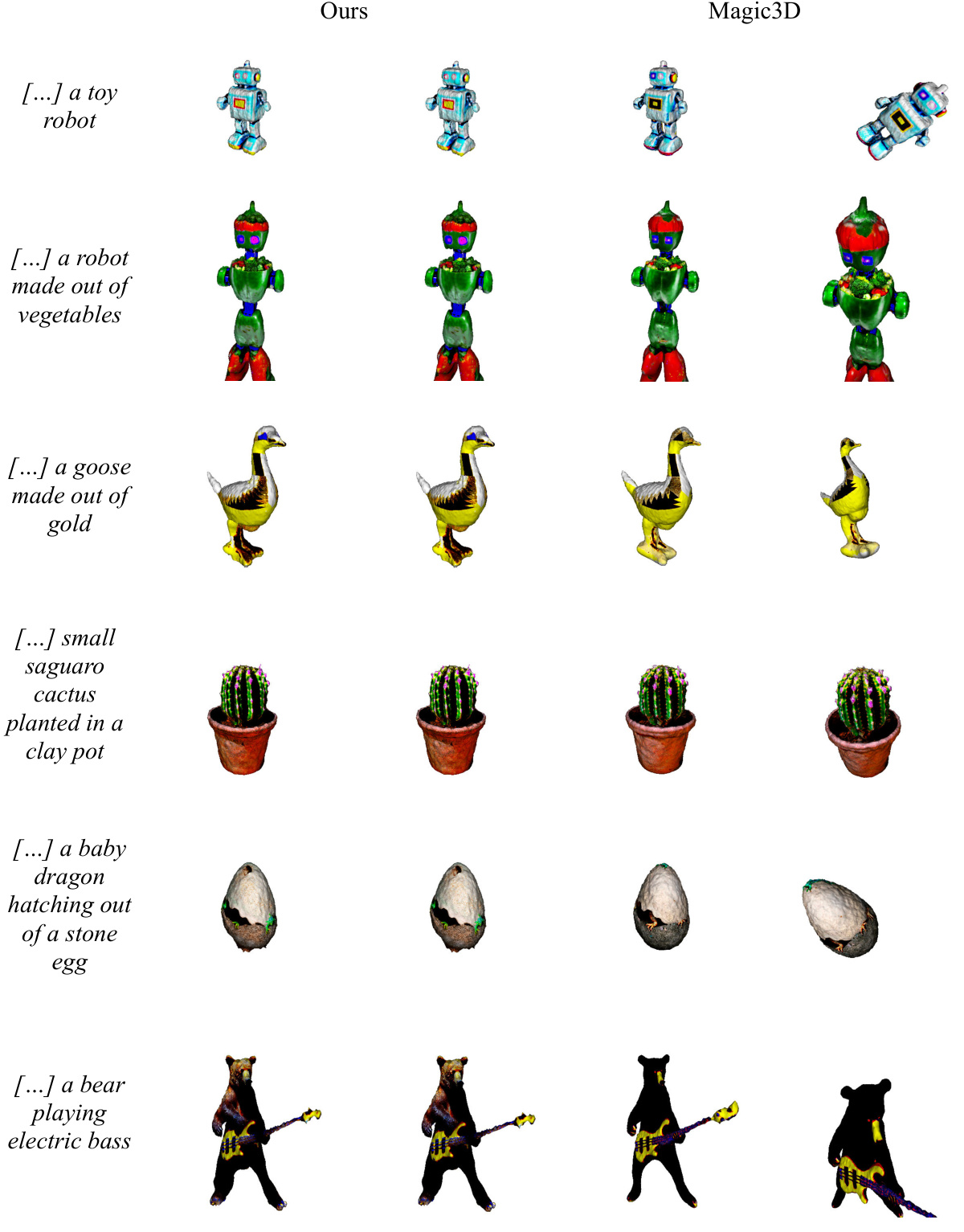
🔼 This figure compares the 3D models generated by the proposed Atlas3D method and the baseline Magic3D method for various text prompts. The prompts involve objects that are expected to be self-supporting, such as a toy robot, a robot made of vegetables, a goose made of gold, a small saguaro cactus planted in a clay pot, a baby dragon hatching out of a stone egg, and a bear playing an electric bass. For each prompt, the figure shows multiple views of the models generated by each method, illustrating the improvements in terms of stability and realism achieved by Atlas3D.
read the caption
Figure 14: More comparison with Magic3D baseline
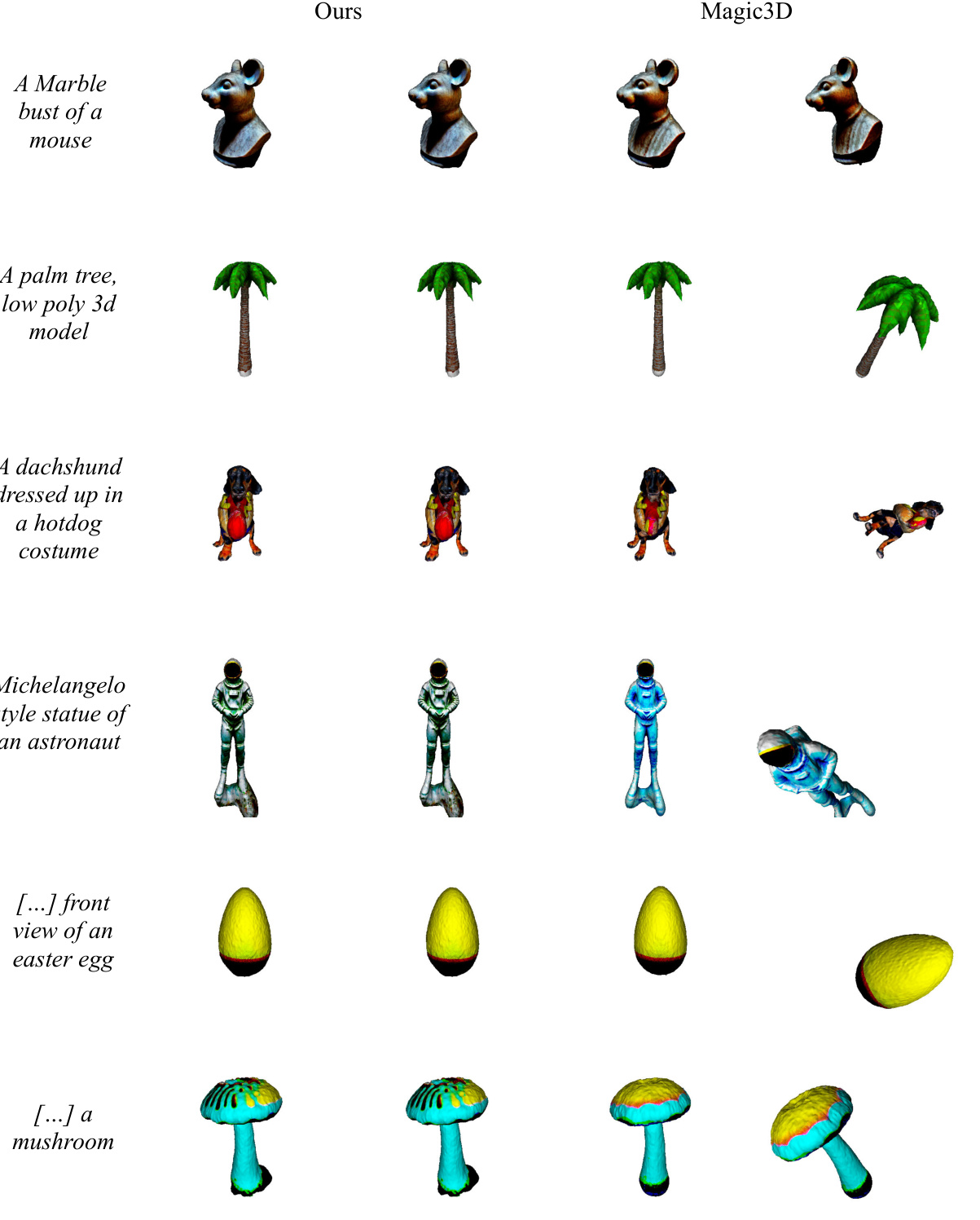
🔼 This figure shows a qualitative comparison of 3D models generated by the proposed Atlas3D method and the baseline Magic3D method for various text prompts. Each row represents a different prompt, and the columns show the results from Atlas3D and Magic3D respectively. The figure visually demonstrates that Atlas3D generates more physically plausible and stable 3D models than Magic3D, especially in terms of their ability to stand upright.
read the caption
Figure 15: More comparison with Magic3D baseline
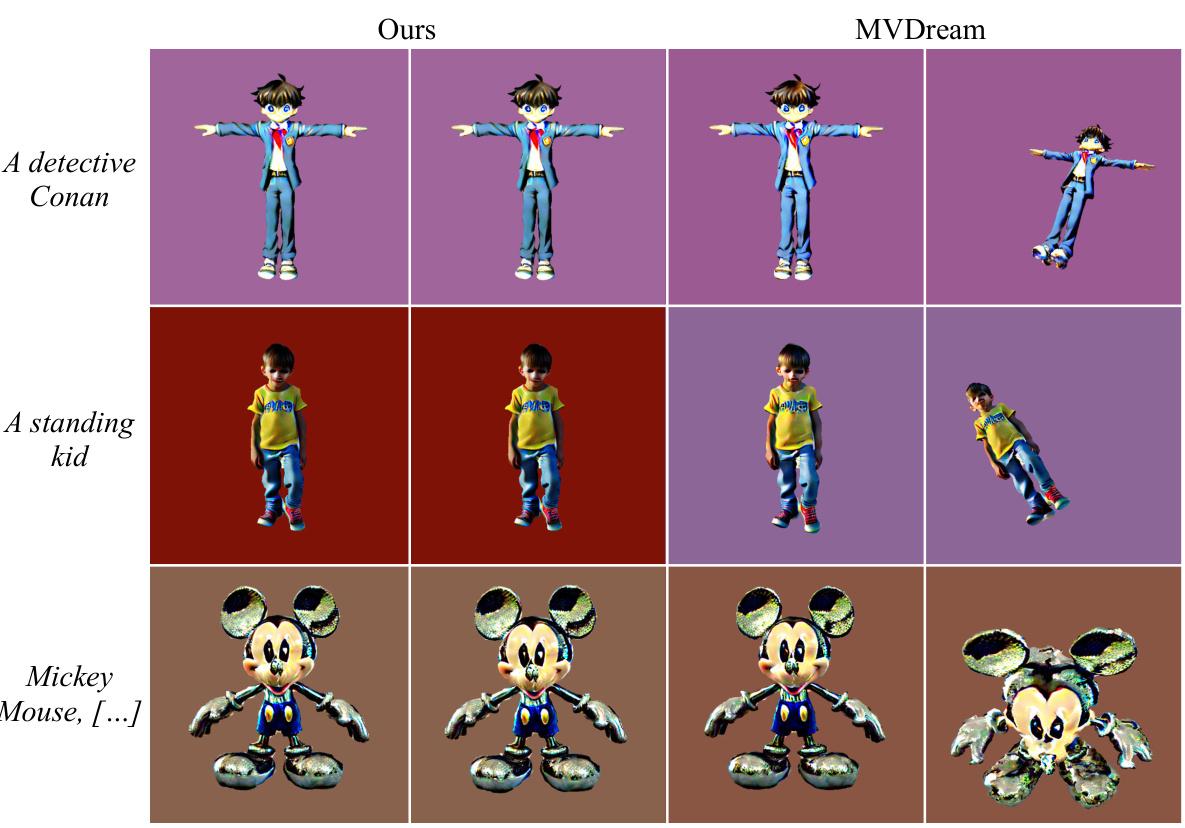
🔼 This figure compares the 3D models generated by Atlas3D and MVDream for three different prompts: ‘A detective Conan’, ‘A standing kid’, and ‘Mickey Mouse, …’. Atlas3D produces stable, upright models in all cases, while MVDream’s results are sometimes unstable and fall over.
read the caption
Figure 16: More comparison with MVDream baseline
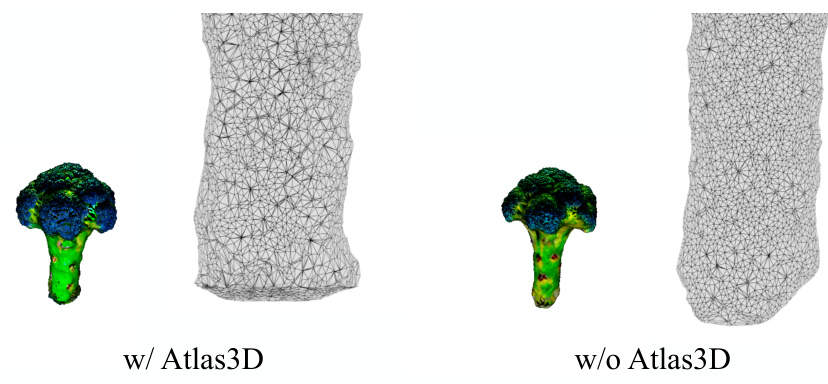
🔼 This figure compares the stability of 3D models generated using the proposed Atlas3D framework and existing methods. Subfigure (a) shows 3D models generated by Atlas3D, which are able to stand stably on the ground without additional support. Subfigure (b) shows 3D models generated by existing methods that fall over, highlighting the effectiveness of Atlas3D in producing physically plausible and self-supporting models.
read the caption
Figure 1: Simulation in ABD [27]: (a) 3D models generated from our Atlas3D framework can stand steadily on the ground; (b) those generated from existing methods tend to fall over.
🔼 This figure shows the results of a robot manipulation experiment. It visually presents the process of using a robot arm to place several 3D printed figurines on a flat surface. The images show the robot arm’s gripper interacting with each figurine, followed by the figurine being placed on the ground. This demonstrates the stability of the 3D-printed models generated by Atlas3D, even under the slight disturbances involved in robot manipulation.
read the caption
Figure 18: Robot manipulation experiment
More on tables
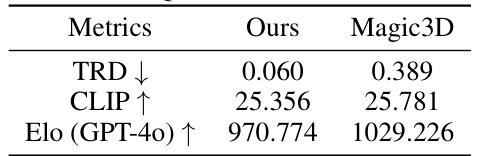
🔼 This table presents a quantitative comparison of the proposed Atlas3D method and the Magic3D baseline using three metrics: TRD (Time-Averaged Rotation Deviation Loss), CLIP (Contrastive Language-Image Pre-training), and Elo (GPT-40). Lower TRD values indicate better stability, while higher CLIP and Elo scores suggest better alignment with text prompts and higher overall quality. The results demonstrate that Atlas3D achieves significantly better stability while maintaining comparable quality to the baseline.
read the caption
Table 2: Quantitative Evaluation

🔼 This table presents the results of a robotic manipulation experiment. It shows the number of successful trials (out of 4) for each of eight different 3D-printed figurines generated using both the baseline method and the Atlas3D method. A successful trial is defined as the figurine remaining standing after being gently placed on the ground by a robot arm.
read the caption
Table 3: Number of successes in robotic trials.

🔼 This table presents the results of user studies conducted to evaluate the standability of 3D-printed figurines generated using both the Atlas3D method and the baseline method. For each of eight different figurine types, the number of successful trials out of 50 is shown. A successful trial is defined as the figurine remaining upright on a table after being placed there by a human participant. The results demonstrate a significantly higher success rate for figurines generated using Atlas3D compared to the baseline.
read the caption
Table 4: Number of successes in user studies.
Full paper#