TL;DR#
Computing correlated equilibria in extensive-form games is computationally challenging. Existing algorithms either have high time complexity or minimize weaker notions of regret. This problem stems from the difficulty of computing approximate fixed points, a crucial step in many regret minimization algorithms. The existing methods for computing fixed points have high time complexity, or they only minimize weaker notions of regret.
This paper introduces new, efficient algorithms that minimize regret against low-degree polynomial swap deviations. The key innovation is a relaxed notion of “fixed points in expectation”, which is computationally tractable unlike the traditional fixed point problem. The authors also relate low-degree deviations to low-depth decision trees, resulting in improved time complexity bounds. These contributions provide a significant advancement in the field by bridging the gap between existing methods and offering a more practical approach to regret minimization.
Key Takeaways#
Why does it matter?#
This paper is crucial for researchers in game theory and online learning because it presents efficient algorithms for minimizing regret in extensive-form games, a significant improvement over existing methods. It opens new avenues for developing faster algorithms for computing correlated equilibria and offers a novel approach for circumventing the computational challenges associated with fixed-point computations.
Visual Insights#

🔼 This figure shows a simple example of a tree-form decision problem. Decision nodes, where the player chooses an action, are represented by black squares, while observation nodes, where the environment makes a choice, are white squares. Each edge is labeled with the action that leads to the next node. The leaves of the tree represent the terminal nodes of the decision process. The pure strategies for the player are represented by binary vectors where each element corresponds to a terminal node and indicates whether the path leading to that node is chosen by the player (1) or not (0). In this example, a player must choose exactly one terminal node. This constraint is expressed mathematically as the sum of the vector elements equals 1.
read the caption
Figure 1: An example of a tree-form decision problem. Decision points are black squares with white text labels; observation points are white squares. Edges are labeled with action names, which are numbers. Pure strategies in this decision problem are identified with vectors x = (x1, x2, x3, x4, x5) ∈ {0,1}5 satisfying ∑5i=1 xi = 1.
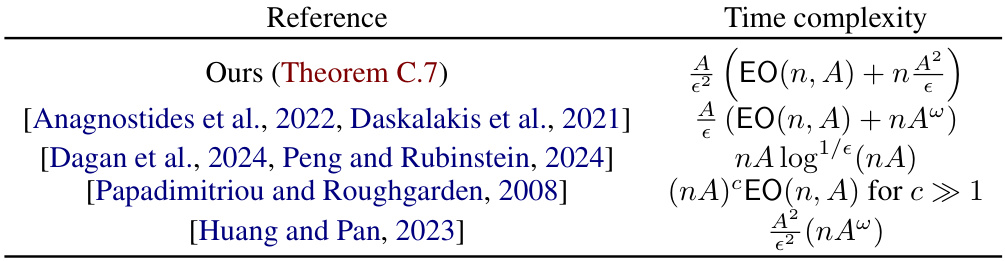
🔼 This table compares the time complexity of different algorithms for computing e-correlated equilibria in n-player normal-form games. The algorithms are compared based on their time complexity, considering the number of actions (A), players (n), and the precision parameter (e). The table highlights the improvement achieved by the authors’ proposed algorithm (Theorem C.7) compared to previous state-of-the-art methods. Note that the time complexity is expressed using Big O notation, and some factors like absolute constants and polylogarithmic factors are suppressed for brevity. The computations are also assumed to happen in the RealRAM model.
read the caption
Table 1: Time complexity for computing e-correlated equilibria in n-player normal-form games with A actions per player. The second column suppresses absolute constants and polylogarithmic factors. For simplicity, issues related to bit complexity have been ignored (that is, we work in the RealRAM model of computation).
Full paper#