↗ OpenReview ↗ NeurIPS Homepage ↗ Chat
TL;DR#
Cardiac motion tracking is crucial for assessing heart function, but existing methods struggle with temporal dynamics and spatial variability. These limitations often lead to inaccurate motion analysis, hindering the effectiveness of cardiac image processing.
GPTrack uses sequential Gaussian processes to model the temporal dynamics and incorporates spatial information to account for regional variability. By using a bidirectional recursive manner, GPTrack effectively captures long-term relationships in motion, mimicking the behavior of diffeomorphic registration. This approach significantly improves the accuracy of motion tracking in both 3D and 4D medical images, while maintaining computational efficiency. The framework’s novel design enhances the robustness and precision of cardiac motion analysis.
Key Takeaways#
Why does it matter?#
This paper is important because it presents GPTrack, a novel and efficient framework for cardiac motion tracking that significantly improves accuracy. It addresses limitations of existing methods by leveraging Gaussian processes and bidirectional recurrence, paving the way for more precise and robust analysis of cardiac function and ultimately improving diagnosis and treatment.
Visual Insights#
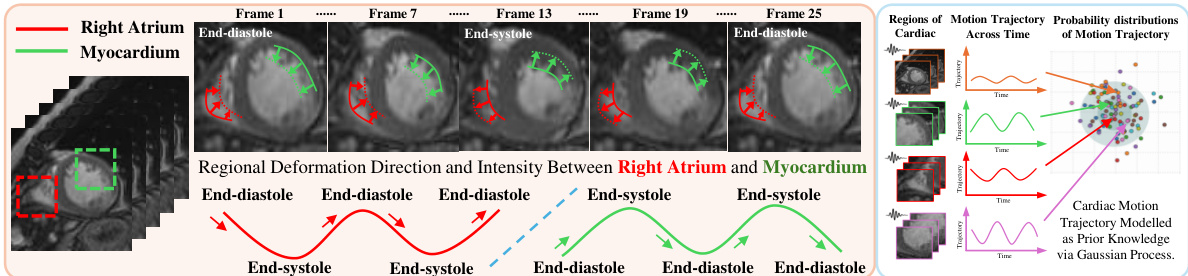
The figure is composed of two parts. The left part shows sequential MRI frames of a heartbeat cycle, highlighting the differences in motion direction and intensity between the right atrium and myocardium during end-diastole and end-systole. The right part illustrates how the cardiac motion trajectory can be modeled as prior knowledge using a Gaussian process, showing regions of motion trajectory across the heartbeat cycle and their probability distributions.
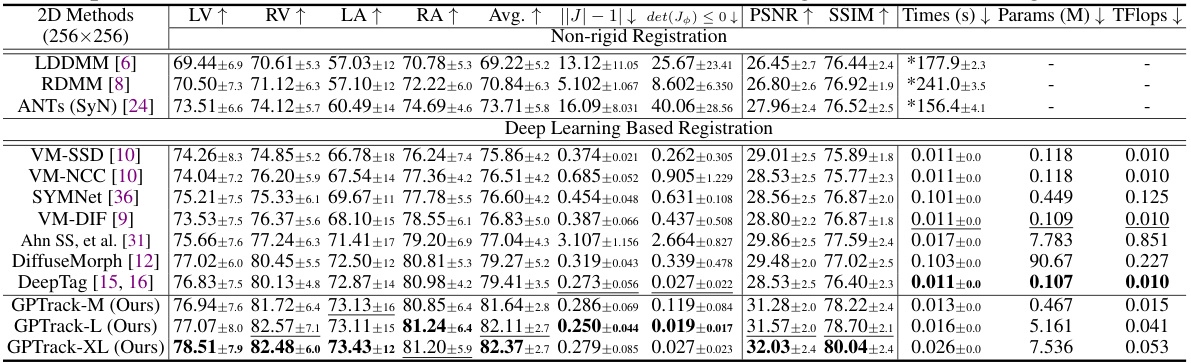
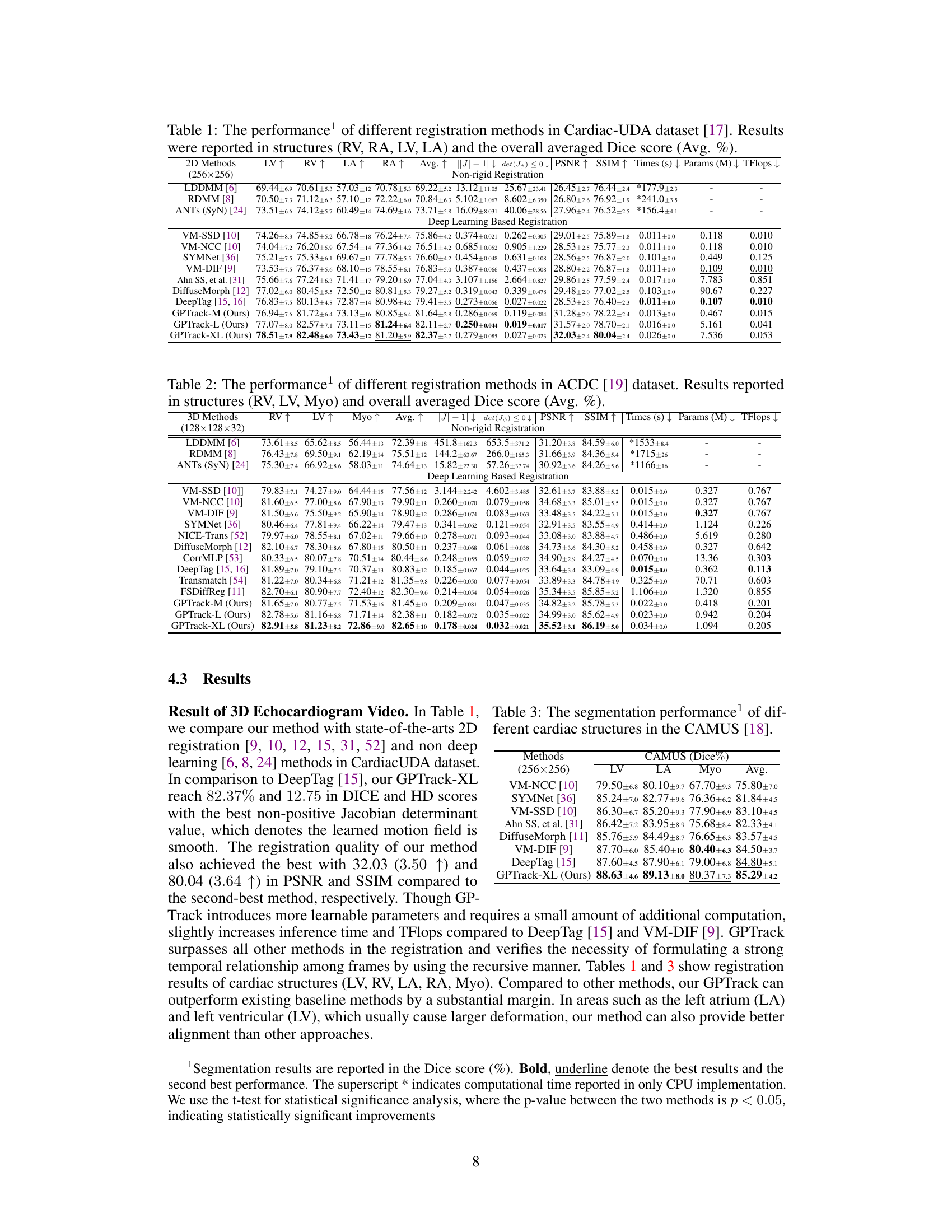
This table presents the performance comparison of various registration methods on the Cardiac-UDA dataset. The metrics used for evaluation include Dice scores for individual cardiac structures (Right Ventricle, Right Atrium, Left Ventricle, Left Atrium) and an average Dice score. Additionally, it shows metrics related to the Jacobian determinant (a measure of diffeomorphic registration quality), PSNR, SSIM, processing time, model parameters, and TFlops. The methods compared encompass both traditional non-rigid registration techniques and deep-learning-based approaches. The GPTrack method proposed by the authors is also included, showing its performance against the state-of-the-art.
In-depth insights#
Cardiac Motion GP#
A hypothetical ‘Cardiac Motion GP’ section would likely detail a Gaussian Process (GP) model applied to cardiac motion analysis. GPs excel at modeling complex, non-linear relationships with uncertainty quantification, making them well-suited for capturing the intricate and variable dynamics of the heart. The discussion would probably cover the GP’s kernel choice, crucial for representing the temporal correlation between heartbeats and spatial correlation between different cardiac regions. Data preprocessing techniques, including image registration and feature extraction from cardiac MRI or echocardiogram sequences, would be described. The section should then explore how the trained GP model is utilized for tasks like motion prediction, segmentation, or anomaly detection, emphasizing the advantages of the probabilistic framework for improved robustness. Evaluation metrics tailored to assess the accuracy and uncertainty of the cardiac motion estimations, such as Dice similarity coefficient for segmentation or root mean square error for motion prediction, would be prominently featured. Lastly, any limitations of the GP approach in this context (e.g., computational cost for high-dimensional data, sensitivity to hyperparameter choices) would be discussed.
Bidirectional Recurrence#
The concept of “Bidirectional Recurrence” in the context of a research paper likely refers to a method that processes sequential data (like time series or video frames) by considering both forward and backward temporal dependencies. This bidirectional approach contrasts with unidirectional methods which only look at previous time steps. A bidirectional model is more powerful because it can capture relationships across longer time spans, as well as contextual information from future time steps. This is crucial in applications where understanding both past and future context is necessary for accurate prediction or analysis, such as in cardiac motion tracking. The ‘recurrence’ aspect suggests that the model employs a recurrent neural network or similar architecture, which allows it to maintain an internal state representing the temporal context, processing information from each time step in relation to this state. This approach likely improves the model’s ability to handle variability and noise inherent in temporal data. The bidirectional aspect likely enhances temporal consistency and spatial variability in the results, giving more accurate and robust motion tracking across cardiac regions throughout the heartbeat cycle.
GPTrack Framework#
The GPTrack framework presents a novel approach to cardiac motion tracking by leveraging the power of Gaussian Processes (GPs) within a bidirectional recurrent framework. GPs are employed to model the temporal dynamics of cardiac motion, capturing long-term relationships and regional variability more effectively than previous methods which typically focus on individual image pairs. The framework’s bidirectional recursive structure mimics diffeomorphic registration, enhancing the accuracy and consistency of motion tracking by aggregating sequential information in both forward and backward directions. This innovative combination of GPs and bidirectional processing provides a robust and efficient solution. Importantly, the GPTrack framework handles spatial variability robustly by encoding spatial statistics at each time point, enhancing the accuracy of motion tracking in diverse cardiac regions. The unsupervised nature of the GPTrack is a significant advantage, reducing the need for manual annotations that can be time consuming and costly.
Comparative Analysis#
A comparative analysis section in a research paper would systematically compare the proposed method against existing state-of-the-art techniques. It should highlight the strengths and weaknesses of each approach, using quantitative metrics (e.g., accuracy, efficiency) and qualitative observations. A crucial aspect would be the identification of specific scenarios where the new method excels or underperforms, illustrating its limitations and potential applications. The comparison should also consider resource requirements, such as computational cost and data demands, to provide a balanced evaluation. Visualizations are also key; tables and graphs can effectively present performance differences and allow for a quick understanding of comparative advantages. The analysis must be thorough and unbiased to ensure that the paper’s claims are fully supported.
Future Directions#
Future research directions stemming from this work could explore several promising avenues. Improving the robustness of GPTrack to handle noise and variations in image quality is crucial for wider clinical applicability. This might involve incorporating more sophisticated noise models or exploring alternative loss functions. Another key direction lies in extending GPTrack to other cardiac imaging modalities beyond MRI and echocardiograms, such as CT scans or ultrasound. Investigating the potential of GPTrack for other medical image registration tasks beyond cardiac motion tracking would further broaden its impact. This could involve adapting the model to specific anatomical structures or pathologies. Finally, integrating GPTrack into a larger clinical workflow would maximize its benefits. This could involve seamless integration with existing diagnostic tools and creating user-friendly interfaces for clinicians.
More visual insights#
More on figures

This figure compares the proposed GPTrack framework with conventional registration frameworks. The GPTrack (a) shows a bidirectional approach, using both forward and backward flows to aggregate sequential information through GP layers. This contrasts with conventional methods (b), which only compare pairs of images sequentially. The GPTrack’s bidirectional recursive structure, with Gaussian processes encoding spatial and temporal dynamics, aims to improve tracking precision and temporal consistency.

This figure shows the architecture of GPTrack, a novel framework for cardiac motion tracking. It consists of a GPTrack layer, a Gaussian Process (GP) layer, and a decoder. The GPTrack layer takes the input data (x) and hidden states (h) from both forward and backward passes to aggregate spatial and temporal information. The GP layer models the cardiac motion dynamics using a probabilistic prior on the latent space. The decoder predicts the motion field (φ). The figure also highlights the use of linear self-attention, layer normalization, and exponential linear units (ELUs) within the GPTrack cell.
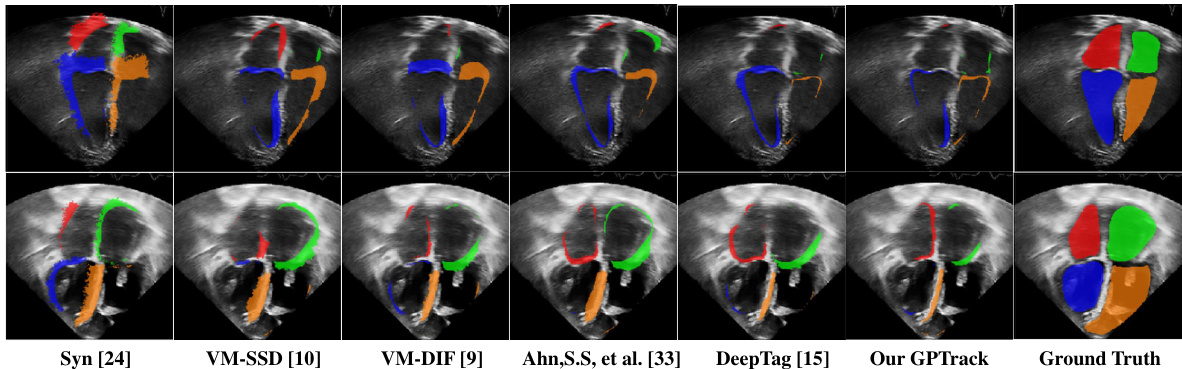
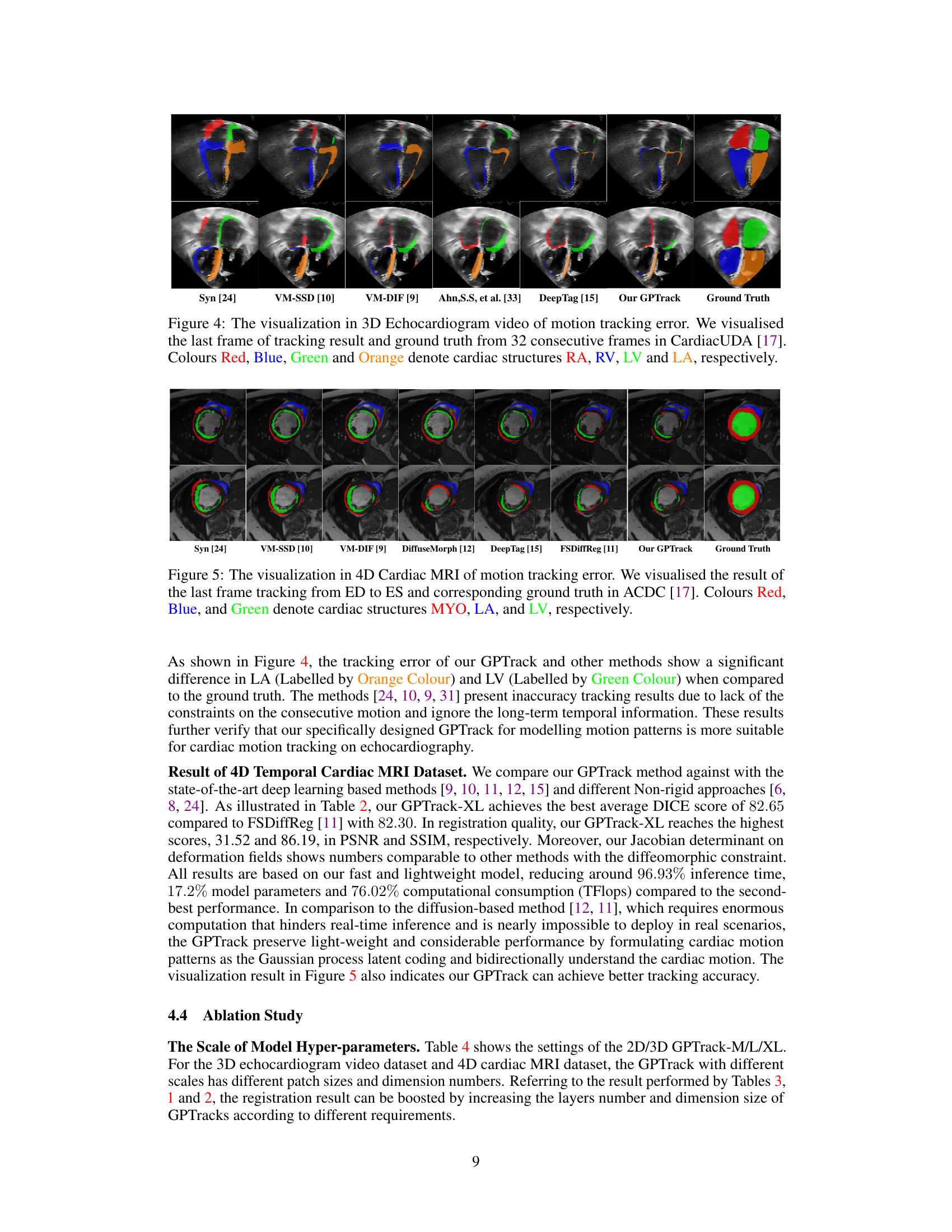
This figure visualizes the motion tracking results from different methods on a 3D echocardiogram video, comparing the last frame of the tracking result with the ground truth. Four cardiac structures (RA, RV, LV, LA) are color-coded for better visualization and comparison. It demonstrates the performance of the proposed GPTrack method against existing state-of-the-art approaches.
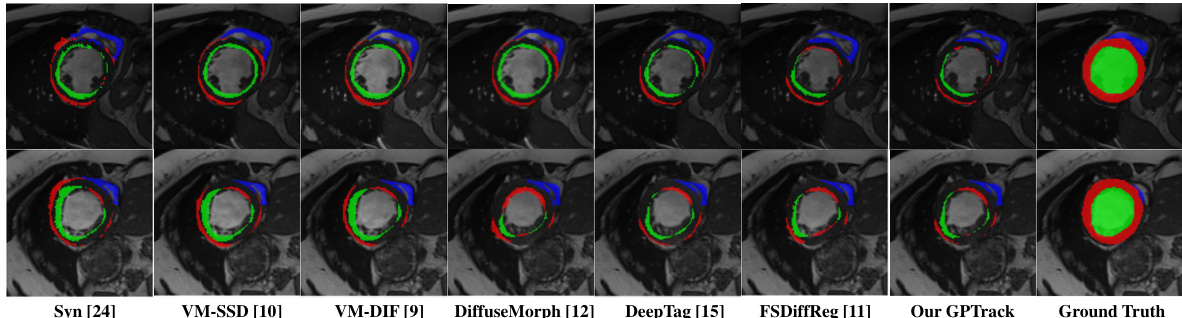
This figure visualizes the results of motion tracking on 3D echocardiogram videos from the CardiacUDA dataset. It compares the last frame of tracking results from several methods (SyN, VM-SSD, VM-DIF, DiffuseMorph, DeepTag, FSDiffReg, and the proposed GPTrack) against the ground truth. Each cardiac structure (Right Atrium, Right Ventricle, Left Ventricle, Left Atrium) is color-coded for easy comparison, highlighting the precision of different approaches in motion tracking.
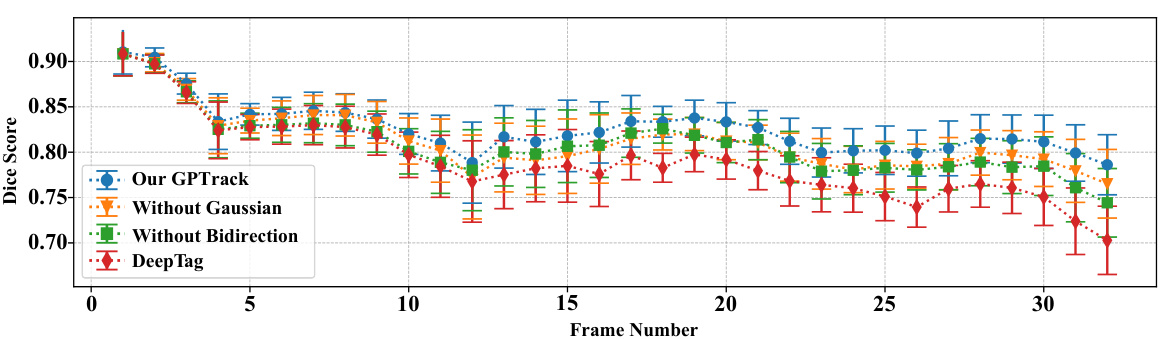
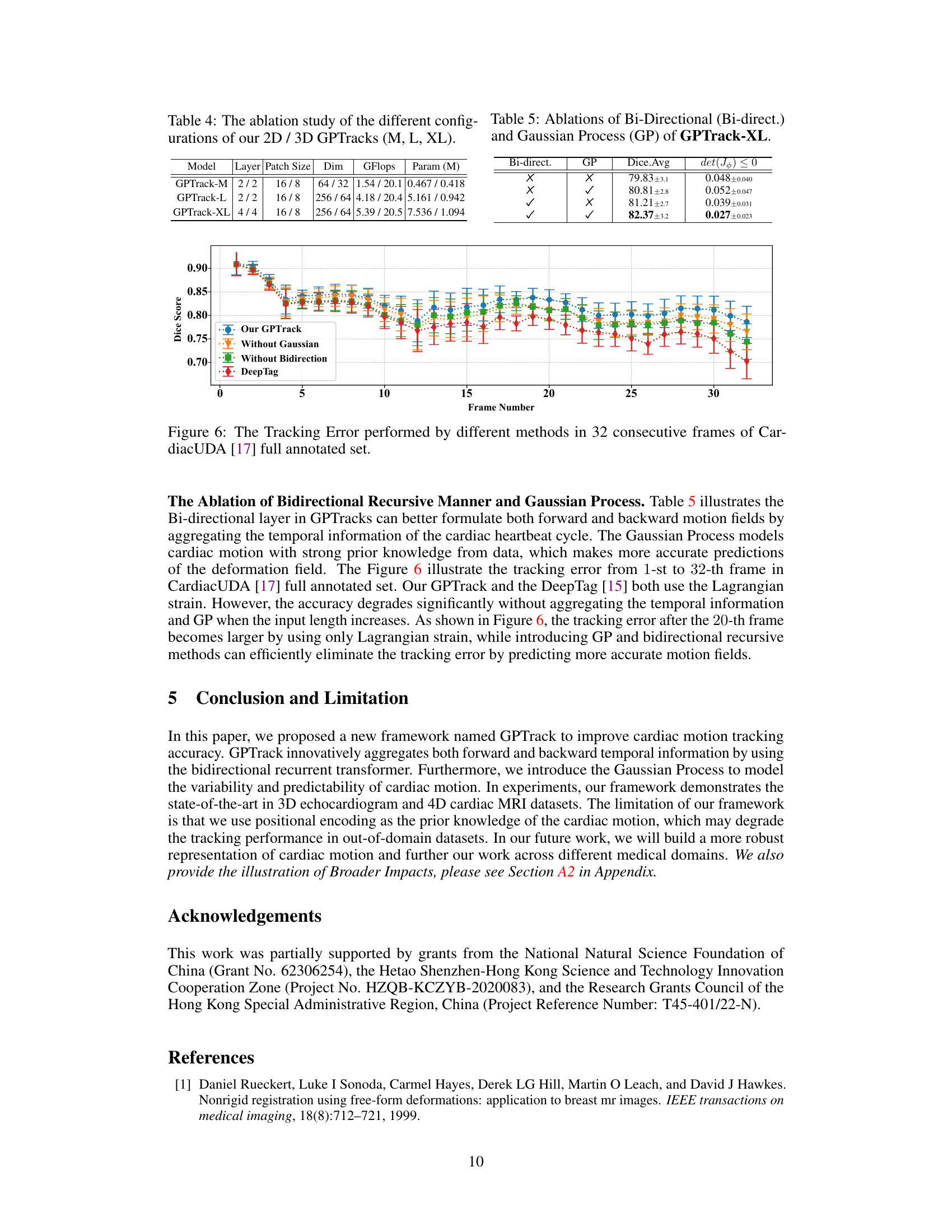
This figure compares the tracking error of GPTrack and several other methods across 32 consecutive frames from the CardiacUDA dataset. It visually demonstrates the superior performance of GPTrack in maintaining accuracy over a longer sequence compared to other methods that show increasing error over time. The graph highlights the effectiveness of incorporating the Gaussian process and bidirectional recursive manner into the GPTrack framework for improved temporal consistency in cardiac motion tracking.

This figure shows the differences in motion between the right atrium and myocardium during a heartbeat cycle. The left side displays sequential MRI frames illustrating these differences in motion direction and intensity. The right side presents a model of cardiac motion as prior knowledge using a Gaussian process. It shows motion trajectories across the heartbeat cycle with probability distributions. This visualizes the pattern of cardiac motion which can be modeled using Gaussian processes.

This figure visualizes the estimated motion field and motion tracking error from a 3D echocardiogram video using the proposed GPTrack method. It shows a comparison between the tracking results and ground truth for eight consecutive frames from the CardiacUDA dataset. The visualization highlights the different cardiac structures (RA, RV, LV, LA) with distinct colors, allowing for a clear assessment of the tracking accuracy and the spatial distribution of errors.
More on tables
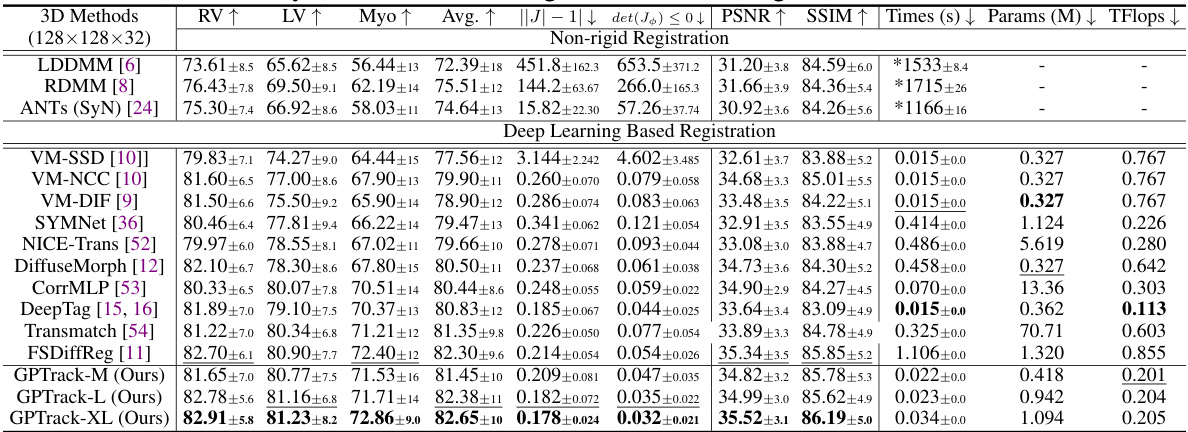
This table presents the performance comparison of various cardiac image registration methods on the Cardiac-UDA dataset. The methods are categorized into traditional non-rigid registration techniques and deep learning-based registration approaches. The performance is evaluated using several metrics: Dice scores for individual cardiac structures (Right Ventricle (RV), Right Atrium (RA), Left Ventricle (LV), Left Atrium (LA)) and an average Dice score, the mean absolute difference between the Jacobian determinant and 1 (||J|-1|), the percentage of non-positive Jacobian determinants (det(J)≤0), Peak Signal-to-Noise Ratio (PSNR), Structural Similarity Index (SSIM), processing time (Times), number of model parameters (Params), and TeraFLOPS (TFlops). The GPTrack models (GPTrack-M, GPTrack-L, GPTrack-XL) represent the proposed methods with varying model sizes.
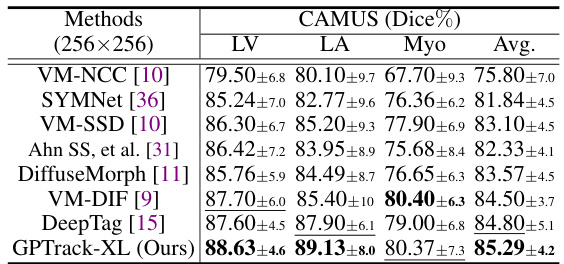
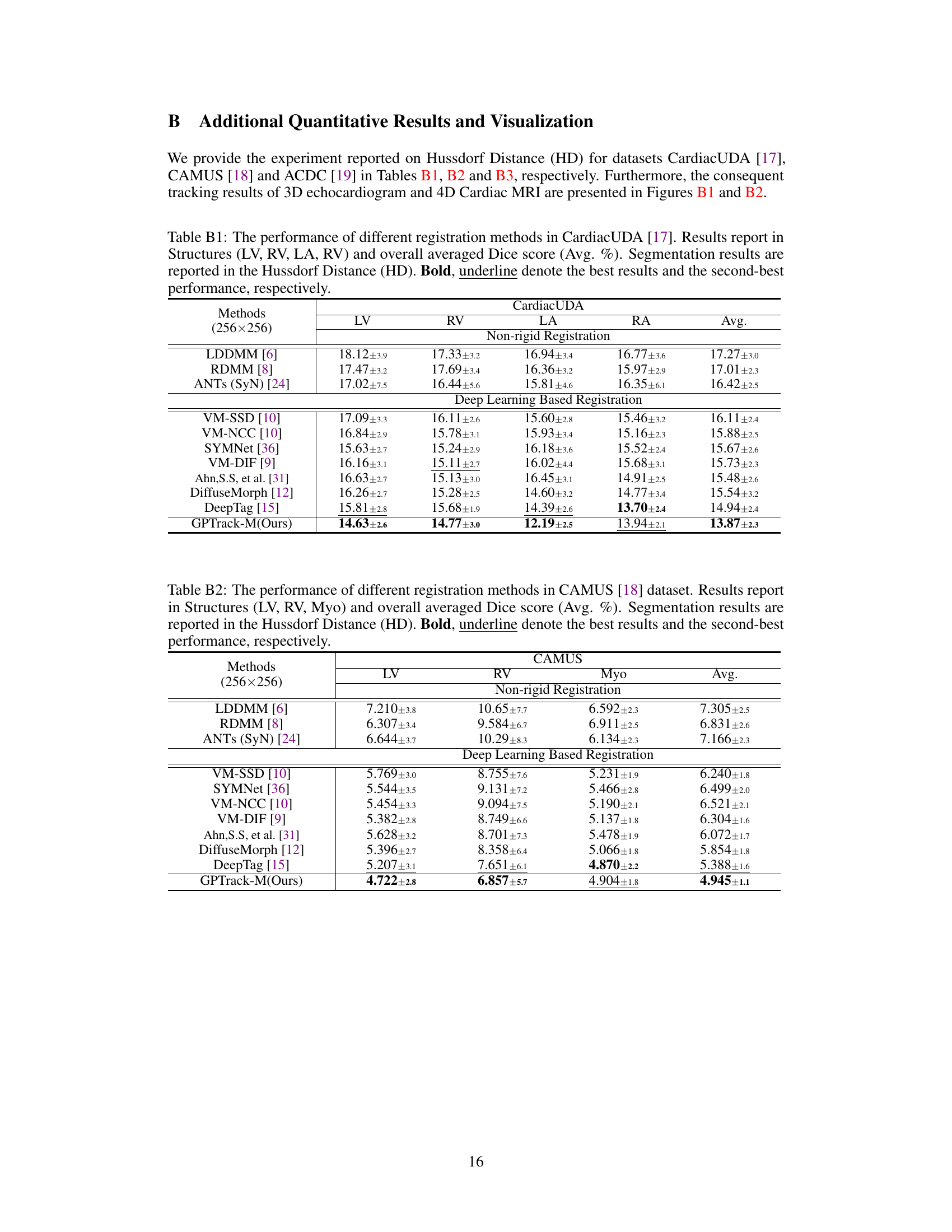
This table compares the performance of different methods for segmenting cardiac structures (LV, LA, Myo) in the CAMUS dataset. The performance metric used is the Dice score, a common metric for evaluating the overlap between predicted and ground truth segmentations. The table shows the average Dice scores and standard deviations for each structure and across all structures (Avg.). Lower Dice scores indicate less accurate segmentation.
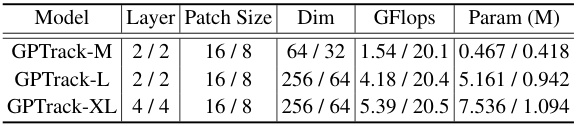
This table presents the ablation study of different configurations of the proposed GPTrack model for 2D and 3D data. It shows how the model’s performance changes based on variations in the number of layers, patch size, and dimension size. The results help determine the optimal configuration for different scenarios and data types.
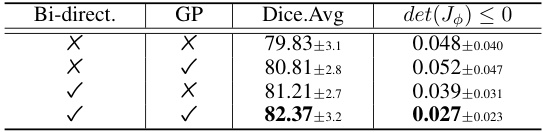
This ablation study investigates the effects of bidirectional processing and Gaussian Process (GP) usage within the GPTrack-XL model. It compares the model’s performance (Dice score and Jacobian determinant) under four conditions: (1) neither bidirectional processing nor GP is used; (2) only GP is used; (3) only bidirectional processing is used; and (4) both are used. The results demonstrate the significant improvement in performance when both techniques are combined, indicating their synergistic effect on cardiac motion tracking accuracy.

This table compares the performance of various cardiac image registration methods on the Cardiac-UDA dataset. The methods are categorized into non-rigid registration techniques and deep learning-based registration techniques. Performance is measured using Dice scores for four cardiac structures (RV, RA, LV, LA) and an average Dice score. Additional metrics such as the mean absolute difference between the Jacobian determinant and 1, the percentage of non-positive Jacobian determinants, PSNR, SSIM, and processing time are also included to provide a comprehensive evaluation.
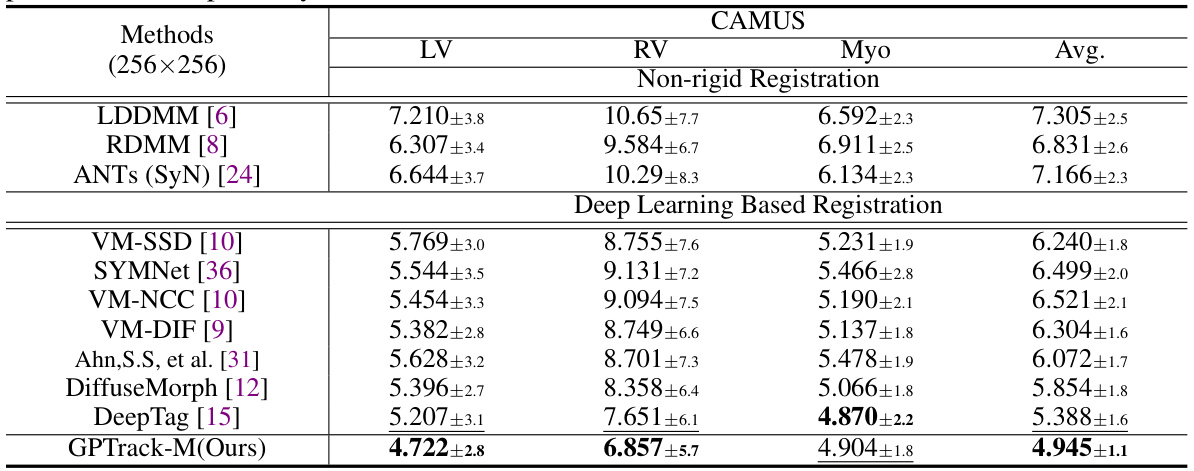
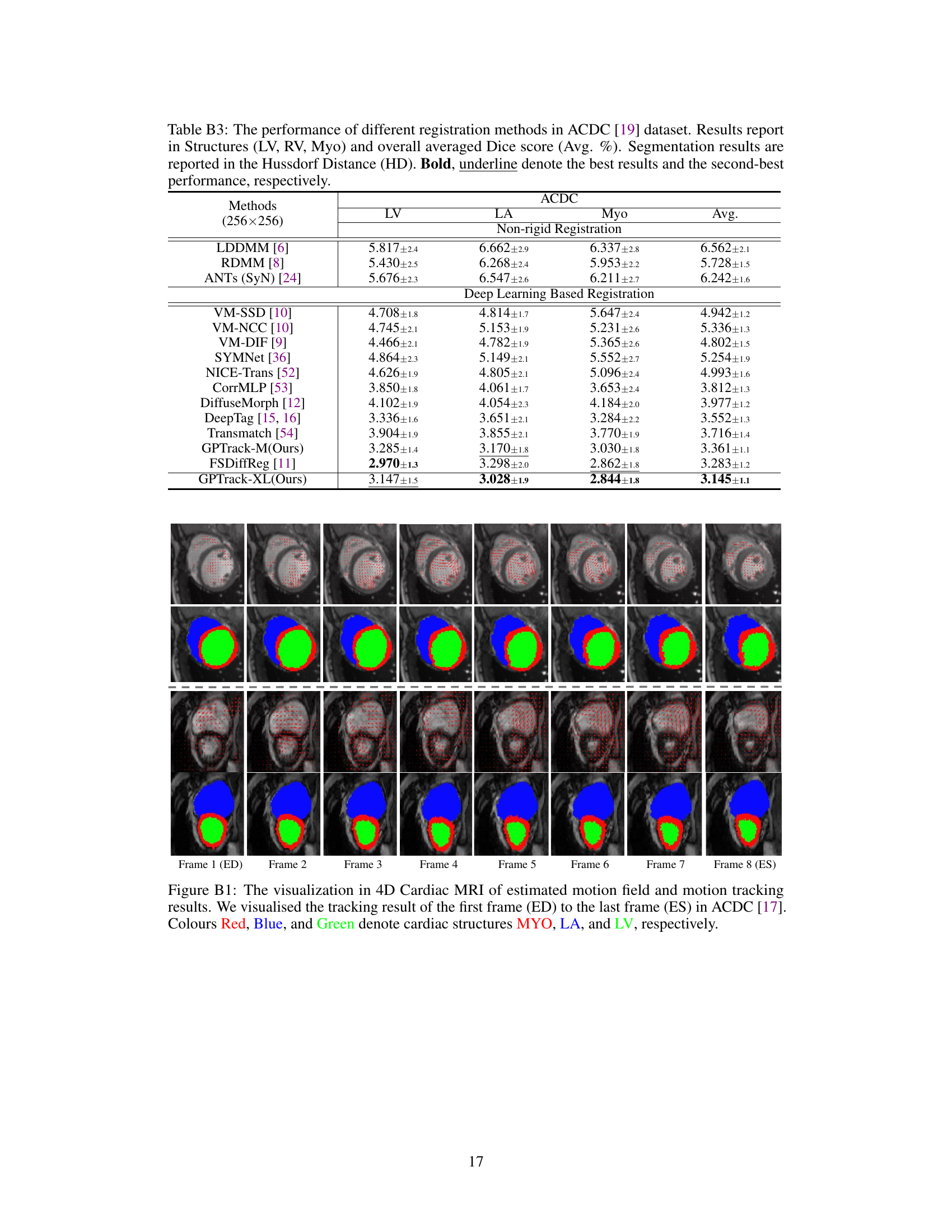
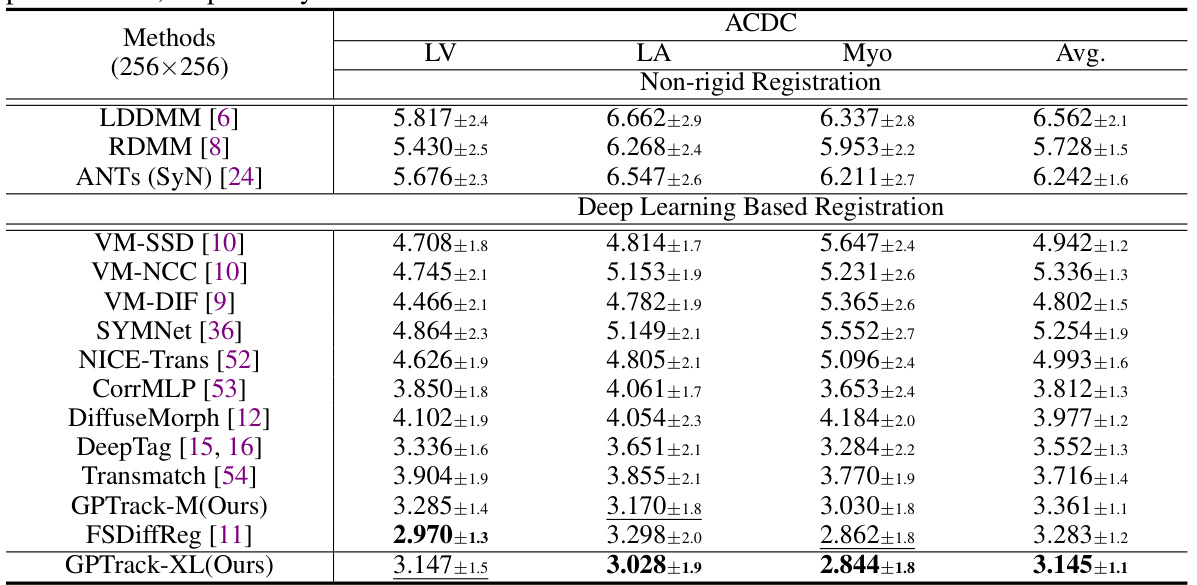
This table compares the performance of various cardiac motion tracking registration methods on the ACDC dataset. The methods are categorized into non-rigid registration and deep learning-based registration techniques. The evaluation metric is the Dice score, calculated for the right ventricle (RV), left ventricle (LV), and myocardium (Myo) structures, as well as an average Dice score across all three structures. The table helps to understand the relative performance of different methods in terms of segmentation accuracy on 3D cardiac MRI data.
This table compares the performance of various registration methods on the ACDC dataset for cardiac motion tracking. The methods are categorized into non-rigid registration and deep learning-based registration approaches. The performance is evaluated based on Dice scores for three cardiac structures (RV, LV, Myo) and an average Dice score across all structures. The table also shows additional metrics such as the mean absolute difference between the Jacobian determinant and 1 (||J|-1|), the percentage of non-positive values of the Jacobian determinant (det(J)≤0), PSNR, SSIM, and computation time (Times), model parameters (Params), and TFlops.
Full paper#