TL;DR#
Autonomous driving requires accurate prediction and planning of multiple agents’ future behaviors, but current methods struggle with scene uncertainty and heterogeneous interactions. Dense representations are inefficient and inconsistent, while sparse ones suffer from misalignment and instability. This paper proposes Behavioral Topology (BeTop), a novel topological formulation that explicitly represents the consensual behavioral patterns among multiple agents. Unlike previous methods, BeTop uses braid theory to distill compliant interactive topology from multi-agent future trajectories.
BeTopNet, a synergistic learning framework based on BeTop, is introduced to improve the consistency of behavior prediction and planning. BeTopNet effectively manages behavioral uncertainty through imitative contingency learning. Extensive evaluations on real-world datasets demonstrate that BeTop achieves state-of-the-art performance in both prediction and planning. The proposed interactive scenario benchmark further showcases planning compliance in interactive cases. The results demonstrate that BeTop’s topological approach significantly enhances performance compared to existing methods, paving the way for safer and more socially acceptable autonomous driving systems.
Key Takeaways#
Why does it matter?#
This paper is crucial for autonomous driving researchers because it introduces a novel topological approach to multi-agent behavioral modeling, addressing the limitations of existing methods. Its innovative use of braid theory to represent compliant interactions among agents offers a more robust and efficient way to predict and plan collective behaviors, which is vital for safe and socially acceptable autonomous navigation. This work opens new avenues for research in topological data analysis, multi-agent systems, and autonomous driving.
Visual Insights#

🔼 This figure illustrates different approaches to multi-agent behavioral modeling in autonomous driving. (a) shows a sample driving scenario. (b) demonstrates dense representation, which suffers from limitations due to its restrained reception. (c) shows sparse representation, which faces challenges in integrating prediction and planning. (d) introduces the proposed BeTop method that uses braid theory to reason about future topological behaviors, guiding compliant joint prediction and planning.
read the caption
Figure 1: Multi-agent Behavioral Formulation. (a) A typical driving scenario in Arizona, US [35]; (b) Dense representation conducts scalable occupancy prediction jointly, but restrained reception leads to unbounded collisions with planning; (c) Sparse supervision derives multi-agent trajectories with multi-modalities, while it struggles with conflicts among integrated prediction and planning; (d) BeTop reasons future topological behaviors for all scene-agents through braids theory, funneling interactive eventual agents (in highlighted colors) and guiding compliant joint prediction and planning.

🔼 This table compares the performance of different behavioral formulations, including BeTop, against human annotations from the WOMD dataset. The metrics used are Accuracy (Acc.) and Area Under the Curve (AUC). BeTop achieves the highest accuracy and AUC, indicating that its behavior labels are most consistent with human judgment compared to other methods such as k-nearest neighbor ground truth or local attention.
read the caption
Table 1: Analysis on different behavioral formulations. BeTop labels behave most similarly to human annotations [35], excelling over other formulations like k nearest GT or local attention.
In-depth insights#
BeTop: Topological Reasoning#
BeTop, a topological reasoning framework, presents a novel approach to multi-agent behavioral modeling in autonomous driving. Instead of relying on dense or sparse representations of individual agent behaviors, BeTop leverages braid theory to extract a topological representation of collective future interactions. This topological structure, or Behavioral Topology, captures the consensual behavioral patterns among multiple agents, providing a robust and efficient way to guide downstream trajectory prediction and planning. The key advantage lies in BeTop’s ability to reason about compliant interactions directly from the topology, promoting stability and consistency in multi-agent behavior prediction, even under uncertainty. A synergistic learning framework, BeTopNet, further enhances the performance, allowing for efficient reasoning of topological relationships alongside trajectory generation. By incorporating imitative contingency planning, BeTopNet effectively manages behavioral uncertainty while ensuring safety and compliant maneuvers. The results demonstrate state-of-the-art performance on both prediction and planning tasks, highlighting BeTop’s potential as a significant advancement in autonomous driving systems.
Synergistic Learning#
Synergistic learning, in the context of multi-agent systems, focuses on designing models that effectively integrate diverse behavioral representations. This approach avoids the limitations of solely relying on dense or sparse representations, which often lead to inefficient and inconsistent collective patterns. Instead, synergistic learning aims to create a unified framework. This framework guides downstream processes like trajectory generation and planning, promoting compliant and safe interactions between agents. A key aspect involves leveraging topological formations, which are capable of distilling consensual behavior patterns from trajectories, enabling an understanding of how the agents’ paths interweave. This provides valuable supervisory information and enhances the accuracy of predictions and planning. The synergistic learning framework is generally implemented using a neural network architecture. This network integrates both prediction and planning tasks through a cohesive mechanism, using topological information as prior knowledge to guide the attention and improve model consistency. Ultimately, synergistic learning enhances the robustness and efficiency of multi-agent systems by optimizing the overall behavior, rather than focusing on individual aspects of prediction or planning separately.
Contingency Planning#
Contingency planning, in the context of autonomous driving, addresses the inherent uncertainties and dynamic nature of real-world scenarios. It’s a crucial component for safe and robust navigation, especially in interactive environments with unpredictable agents. The core idea is to have backup plans ready to be executed when the primary plan encounters unexpected obstacles or deviations from predicted behaviors. This necessitates the ability to reason about uncertainty and proactively adapt to changing circumstances. Effective contingency planning requires not only the capacity to detect deviations from expectations but also the ability to generate feasible and safe alternative maneuvers, often under time constraints. This planning might involve considering various probabilities of future events and preparing for the most likely outcomes, while accounting for unlikely but potentially hazardous scenarios. The integration of prediction models with the planning component plays a crucial role in this process, enabling anticipation and informed decision making. The challenge is to develop efficient algorithms that can generate reliable contingency plans without compromising performance or increasing computational burden.
Interactive Driving#
Interactive autonomous driving presents a complex challenge, demanding sophisticated systems capable of safe and socially compliant maneuvers in dynamic environments. The core issue lies in resolving multi-agent interactions, predicting the unpredictable behaviors of other road users (pedestrians, cyclists, vehicles), and planning trajectories accordingly. Successful interactive driving systems must seamlessly integrate perception, prediction, and planning modules, leveraging robust algorithms to handle uncertainty and dynamically adapt to changing conditions. Real-time performance is paramount, demanding efficient and scalable solutions that can operate at high speeds without sacrificing safety or performance. Key challenges include efficient scene representation, accurate prediction of diverse agent behaviors, and compliant path planning that prioritizes safety and respects social norms. Future advancements will likely focus on improved scene understanding, more sophisticated behavioral modeling that incorporates intent and context, and better integration of human factors to build systems that are truly interactive and intuitive.
Future Work#
The authors acknowledge that their current BeTop model considers only one-step future topology and focuses on prediction and planning tasks. Future research directions should address limitations by developing a recursive version of BeTop to handle multi-step reasoning in more complex scenarios. This would involve extending the topological formulation and reasoning to encompass multiple time steps, enabling more accurate and robust predictions of long-term interactive behavior patterns. Furthermore, integrating BeTop with perception modules for end-to-end autonomous driving systems would enhance the real-world applicability of the method. Addressing the challenges of 3D scenarios and multi-agent reasoning under 3D conditions should be prioritized. This would involve adapting the topology formulation to represent and reason about 3D spatial interactions and potentially exploring the use of more sophisticated graph neural network architectures to handle the increased complexity. Finally, rigorous testing and evaluation of the enhanced BeTop model in diverse and challenging real-world scenarios is crucial to validate its robustness and performance before deployment in real-world autonomous driving systems.
More visual insights#
More on figures
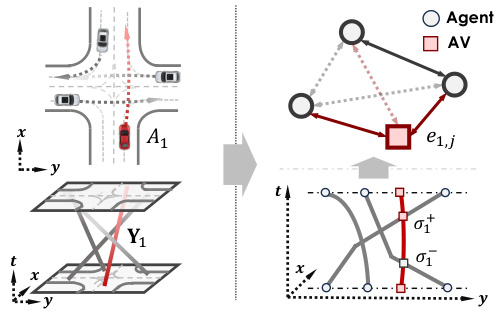
🔼 This figure illustrates the process of forming a Behavioral Topology (BeTop) from multi-agent future trajectories. First, the future trajectories of all agents (including the autonomous vehicle) are represented as braid sets. These braid sets are then used to create a topological graph that explicitly represents the consensual behavioral pattern among the multi-agent futures. The intertwine indicators in the braid sets highlight the interactive behaviors between agents, which are crucial for determining the compliant interactive topology. This topology serves as a supervision signal to guide downstream trajectory generation and planning.
read the caption
Figure 2: BeTop formulation. Joint future trajectories are transformed to braid sets, and then form joint topology through intertwine indicators.
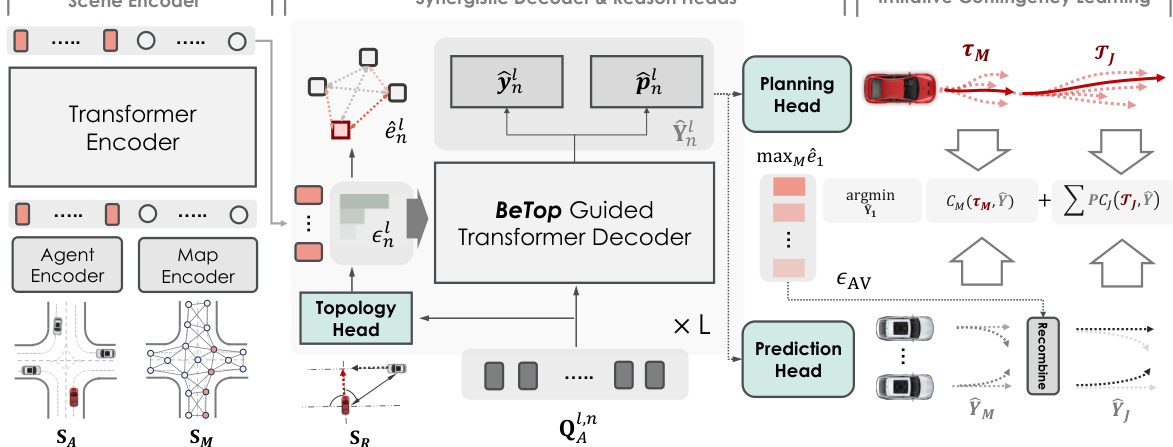
🔼 This figure illustrates the architecture of BeTopNet, a neural network designed for topological reasoning and integrated prediction and planning in autonomous driving scenarios. It highlights three key components: a scene encoder that processes scene information (agent and map data), a synergistic decoder that uses topology-guided local attention to iteratively generate trajectories and edge topology, and an imitative contingency learning module that optimizes both prediction and planning.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.

🔼 This figure shows the architecture of BeTopNet, a synergistic learning framework proposed in the paper. It consists of three main components: a scene encoder that processes scene information (agent and map), a synergistic decoder that iteratively reasons about the behavioral topology and future trajectories using topology-guided local attention, and an imitative contingency learning module that jointly optimizes planning and prediction. The architecture aims to learn a compliant and socially consistent driving behavior by leveraging the topological properties of multi-agent interactions.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.
🔼 This figure shows the architecture of BeTopNet, a synergistic Transformer-based learning stack for learning IPP objectives. It comprises three main components: a scene encoder, a synergistic decoder, and imitative contingency learning. The scene encoder generates scene-aware attributes for agents and the map. The synergistic decoder iteratively reasons about the edge topology and trajectories using topology-guided local attention. Finally, imitative contingency learning optimizes the planning and prediction results jointly.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.

🔼 The figure shows the architecture of BeTopNet, a network designed for topological behavior reasoning and trajectory prediction and planning. It consists of three main components: a scene encoder, a synergistic decoder, and an imitative contingency learning module. The scene encoder processes scene information to generate scene-aware attributes. The synergistic decoder iteratively reasons about edge topology and trajectories using topology-guided local attention. Finally, the imitative contingency learning module optimizes the planning and prediction results using the topology priors.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.

🔼 This figure shows the architecture of BeTopNet, a synergistic learning framework for topological behavior reasoning and interactive prediction and planning. It consists of three main components: a scene encoder that processes scene information (agent states and map data), a synergistic decoder that iteratively reasons about edge topology and trajectories using topology-guided local attention, and an imitative contingency learning module that optimizes planning and prediction jointly. The synergistic decoder is particularly important because it incorporates both dense and sparse representations of multi-agent behaviors to improve consistency and accuracy.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.

🔼 This figure illustrates the architecture of BeTopNet, a synergistic learning framework for topological behavior reasoning and integrated prediction and planning. It consists of three main components: a scene encoder processing scene attributes, a synergistic decoder iteratively reasoning edge topology and trajectories using topology-guided local attention, and an imitative contingency learning module optimizing branched planning and predictions jointly.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.

🔼 This figure compares three different approaches for multi-agent behavioral modeling in autonomous driving: dense representation, sparse representation, and the proposed BeTop approach. (a) Shows a sample driving scenario. (b) Illustrates how dense representation, while scalable, can lead to collisions due to limited perceptual information. (c) Shows how sparse representation, although handling multi-modality, can struggle with conflicting predictions and planning. (d) Presents BeTop, which uses braid theory to reason about topological relationships between agents’ future behaviors, guiding compliant joint prediction and planning.
read the caption
Figure 1: Multi-agent Behavioral Formulation. (a) A typical driving scenario in Arizona, US [35]; (b) Dense representation conducts scalable occupancy prediction jointly, but restrained reception leads to unbounded collisions with planning; (c) Sparse supervision derives multi-agent trajectories with multi-modalities, while it struggles with conflicts among integrated prediction and planning; (d) BeTop reasons future topological behaviors for all scene-agents through braids theory, funneling interactive eventual agents (in highlighted colors) and guiding compliant joint prediction and planning.

🔼 This figure shows the architecture of BeTopNet, a synergistic learning framework that integrates topological reasoning, scene understanding, and planning. It consists of three main components: 1. Scene Encoder: Processes scene information (agent states and map data) to generate scene-aware attributes. 2. Synergistic Decoder: Iteratively reasons about edge topology and trajectories using topology-guided local attention, integrating information from the scene encoder. 3. Imitative Contingency Learning: Optimizes planning and prediction jointly using a combination of topology guidance and an imitative contingency learning approach.
read the caption
Figure 3: The BeTopNet Architecture. BeTop establishes an integrated network for topological behavior reasoning, comprising three fundamentals. Scene encoder generates scene-aware attributes for agent SA and map SM. Initialized by SR and QA, synergistic decoder reasons edge topology ên and trajectories Ŷn iteratively from topology-guided local attention. Branched planning τ∈Ŷ1 with predictions and topology are optimized jointly by imitative contingency learning.
More on tables
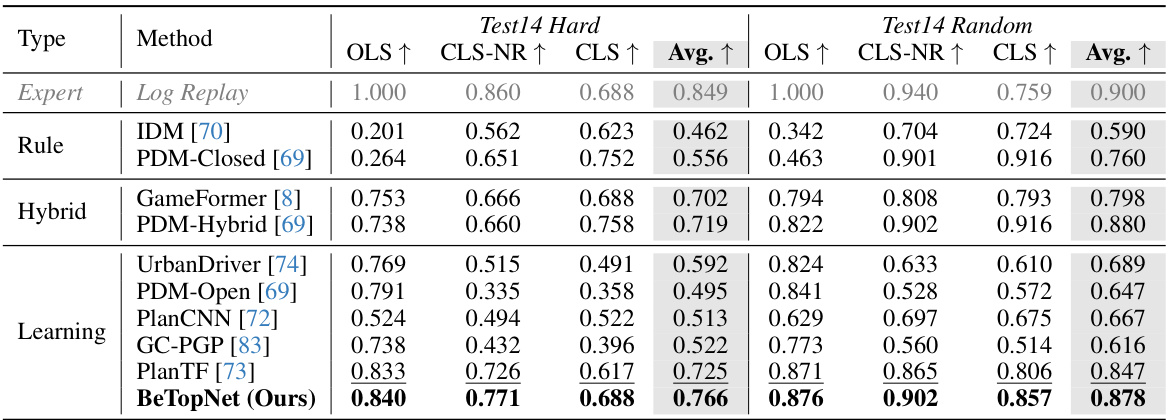
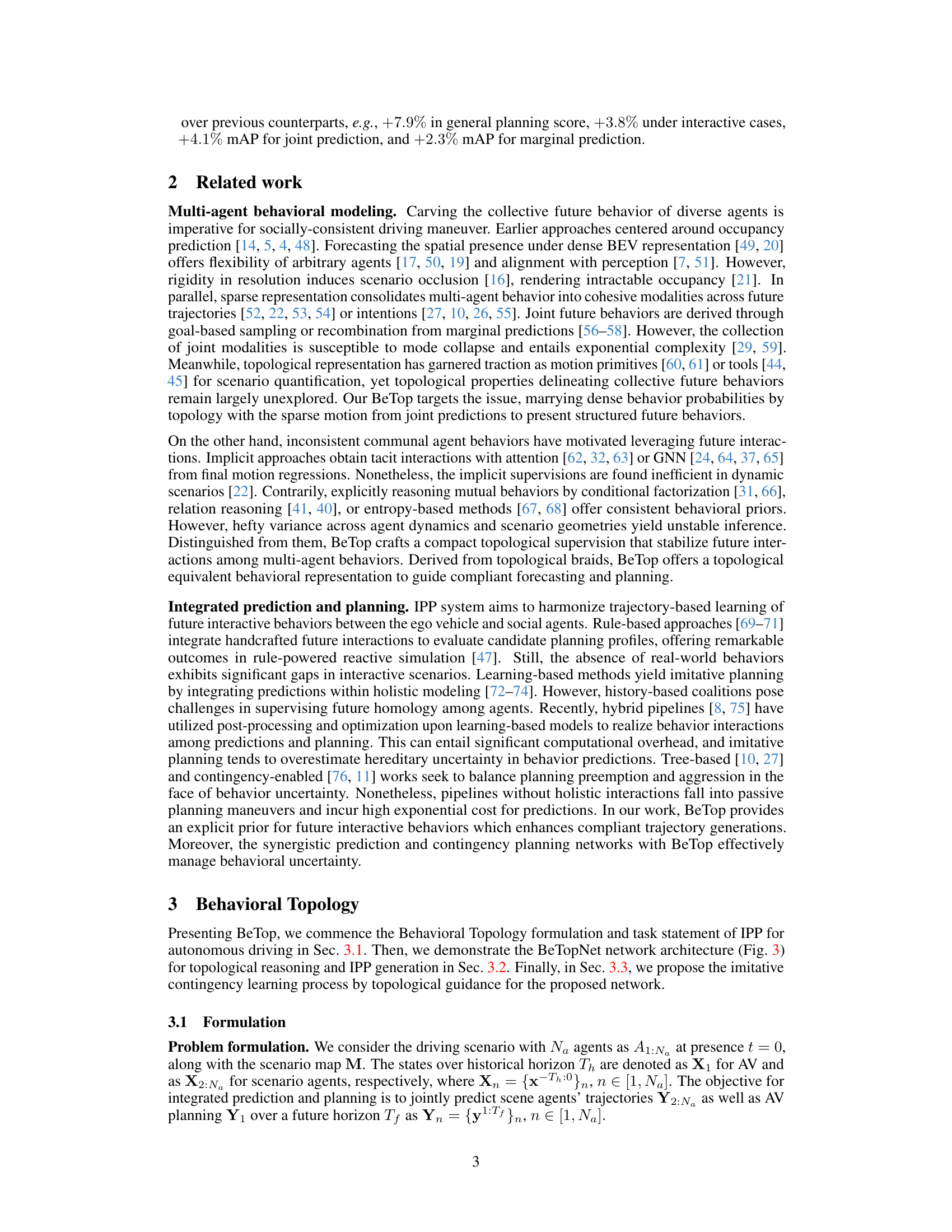
🔼 This table compares the performance of BeTopNet against other state-of-the-art (SOTA) planning methods on two nuPlan benchmarks: Test14-Hard and Test14-Random. The comparison is done for open-loop and closed-loop planning scenarios, and the table highlights BeTopNet’s superior performance, particularly in challenging scenarios.
read the caption
Table 2: Performance comparison of open- and closed-loop planning on nuPlan benchmarks. BeTopNet positions top average planning score and non-reactive simulation amongst SOTA planning systems by all types (rule, learning, and hybrid), especially under difficult benchmarked scenarios.

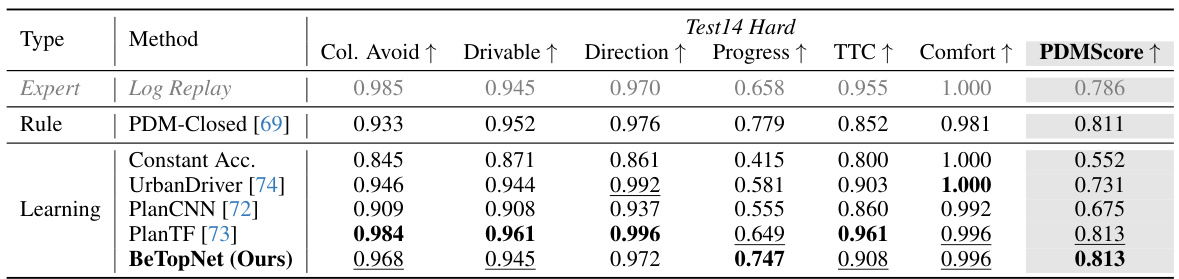
🔼 This table presents the results of closed-loop planning experiments conducted using the nuPlan benchmark. The experiments focused on interactive scenarios, which are more challenging compared to non-interactive scenarios. The table compares the performance of BeTopNet against several other state-of-the-art planning systems. The performance is evaluated based on several key metrics: Collision Avoidance, Drivable Area, Direction Accuracy, Driving Progress, Time to Collision, and Comfort. The final score is the PDMScore, which represents an overall measure of planning performance. BeTopNet outperforms other methods, particularly in challenging scenarios.
read the caption
Table 3: nuPlan closed-loop planning results on the proposed interactive benchmark. BeTopNet achieves desirable PDMScore, with planning safety, road compliance, and driving progress.
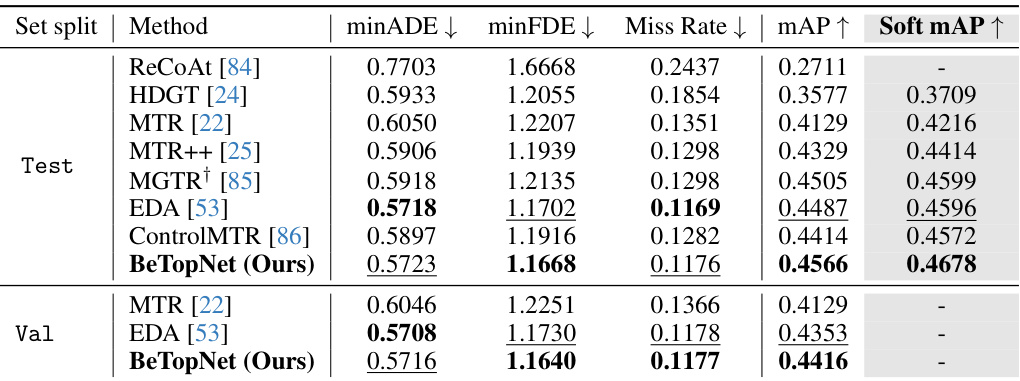
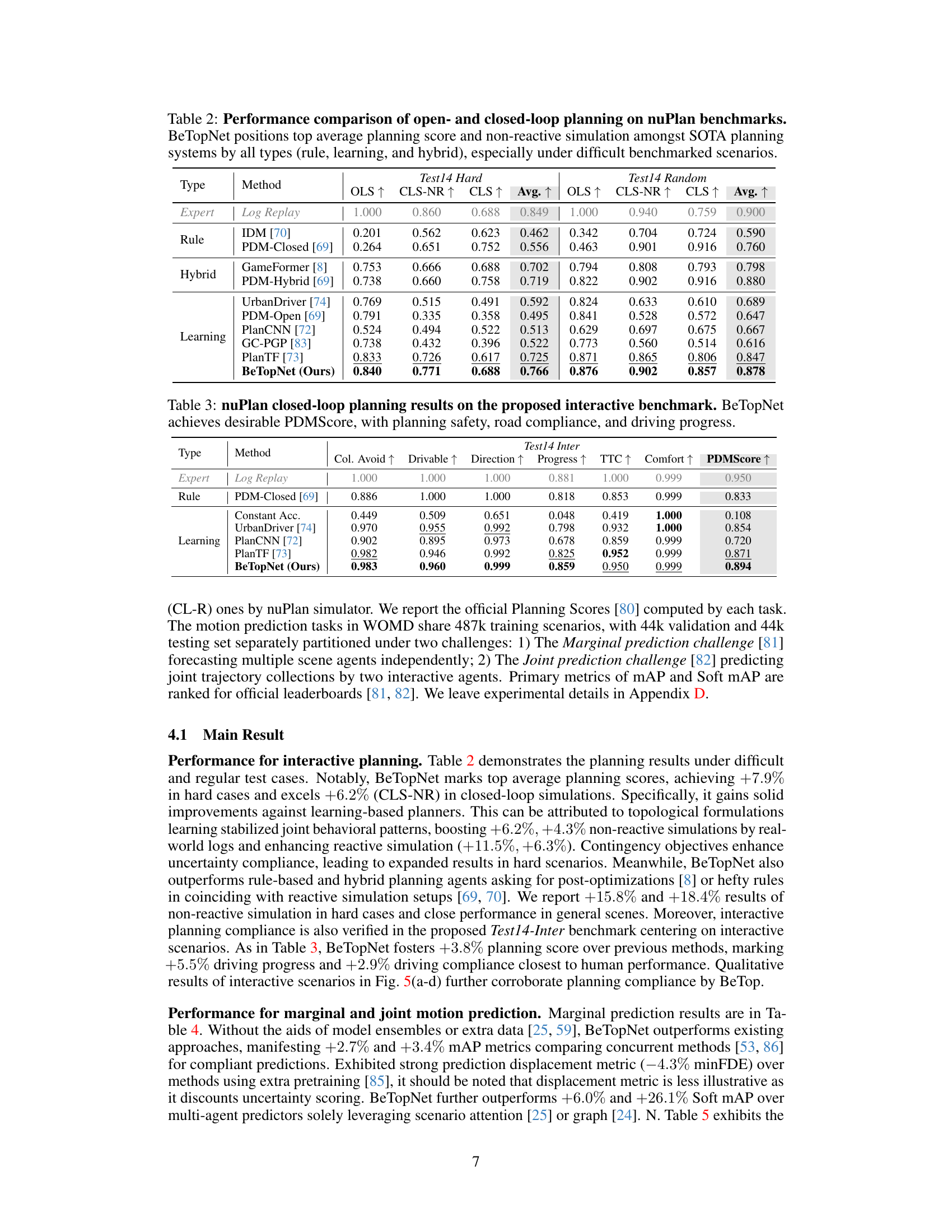
🔼 This table presents the results of the marginal prediction task on the Waymo Open Motion Dataset (WOMD) leaderboard. It compares the performance of BeTopNet against several state-of-the-art methods. The metrics used include minimum average displacement error (minADE), minimum final displacement error (minFDE), miss rate, mean average precision (mAP), and soft mAP. The table highlights that BeTopNet outperforms other methods without using model ensembles or extra data, showcasing its effectiveness in this task.
read the caption
Table 4: Performance of marginal prediction on WOMD Motion Leaderboard. BeTopNet surpasses existing motion predictors without model ensemble or using extra data. † extra LIDAR data and pretrained model. Primary metric.

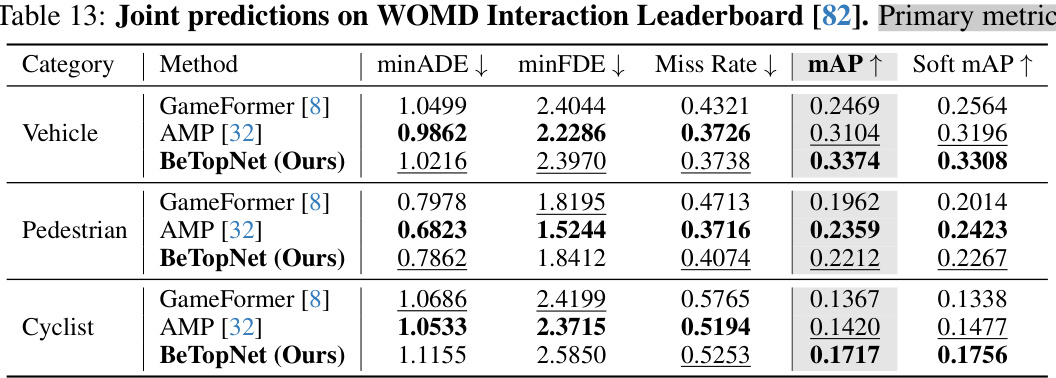
🔼 This table presents the results of the joint prediction task on the Waymo Open Motion Dataset (WOMD) interaction leaderboard. It compares the performance of BeTopNet against other state-of-the-art methods, focusing on metrics such as minimum average displacement error (minADE), minimum final displacement error (minFDE), miss rate, mean average precision (mAP), and soft mAP. The table highlights BeTopNet’s superior performance in both mAP metrics.
read the caption
Table 5: Performance of joint prediction on WOMD Interaction Leaderboard. BeTopNet outperforms in both mAP metrics.

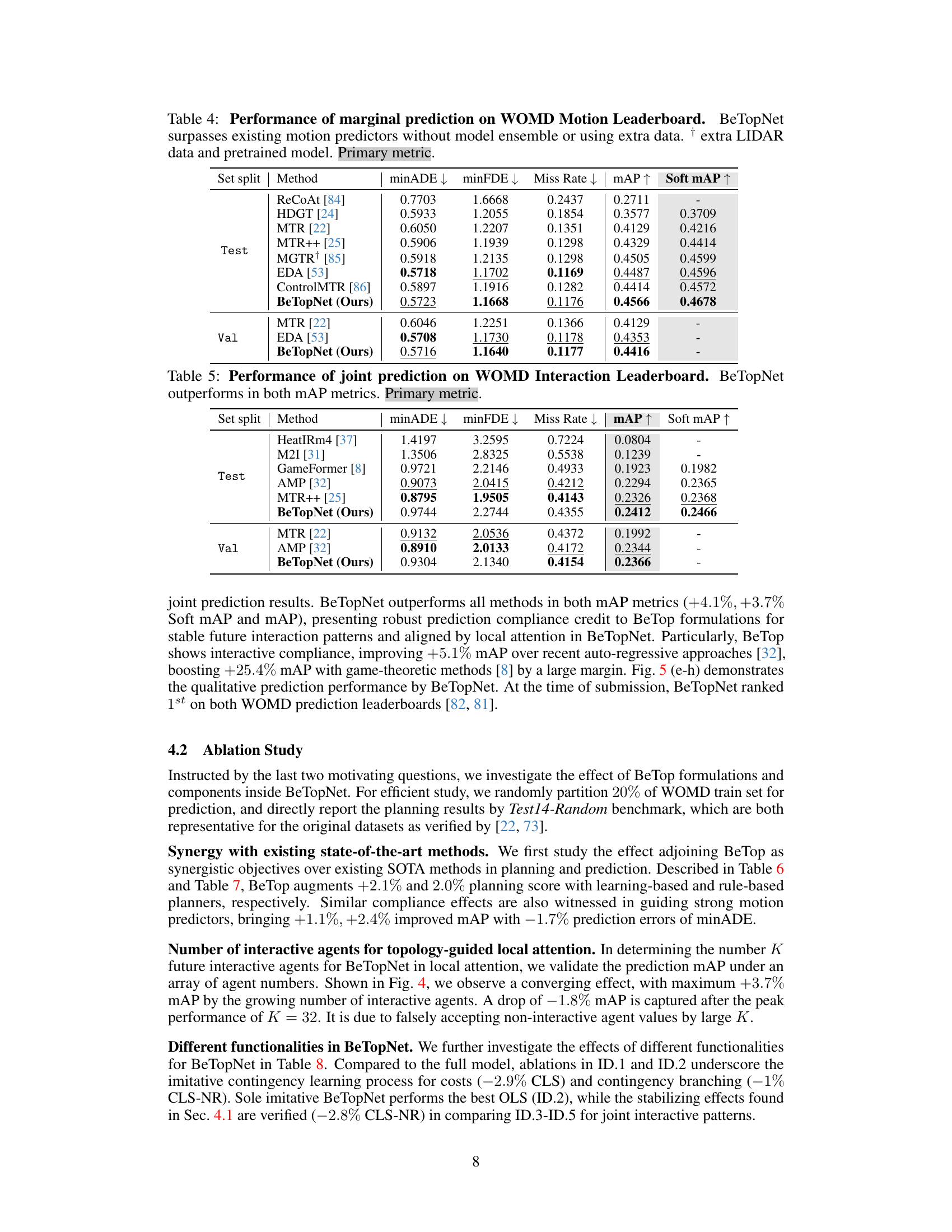
🔼 This table presents the results of integrating the proposed BeTop method with two strong planning baselines (PDM and PlanTF) on the nuPlan benchmark. It shows the performance improvements achieved by adding BeTop to these baselines, indicating the effectiveness of BeTop in improving planning performance. The results are broken down by open-loop planning (OLS), closed-loop non-reactive (CLS-NR), closed-loop (CLS), and an average (Avg) across the three metrics.
read the caption
Table 6: Results of integrating BeTop by strong planning baselines in nuPlan benchmark.
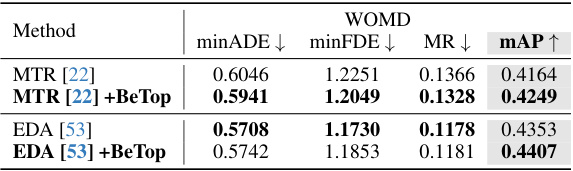
🔼 This table presents the results of integrating BeTop with strong prediction baselines on the Waymo Open Motion Dataset (WOMD). It shows the improvement in prediction accuracy (mAP and Soft mAP) and reduction in error (minADE and minFDE) and miss rate when BeTop is added to existing methods (MTR and EDA). The results demonstrate that BeTop enhances the performance of these strong baselines, further highlighting its effectiveness.
read the caption
Table 7: Results of integrating BeTop by strong prediction baselines in WOMD benchmark.

🔼 This table presents the ablation study results on the nuPlan benchmark. It shows the performance of BeTopNet with different components removed to understand their contribution to the overall performance. The results are presented in terms of OLS (Open-Loop Score), CLS-NR (Closed-Loop Non-Reactive Score), and CLS (Closed-Loop Score). The table highlights the importance of the contingency planning component for achieving good performance in closed-loop scenarios.
read the caption
Table 8: Results of BeTopNet planning performance with different components. Contingency is the key for closed-loop simulation.
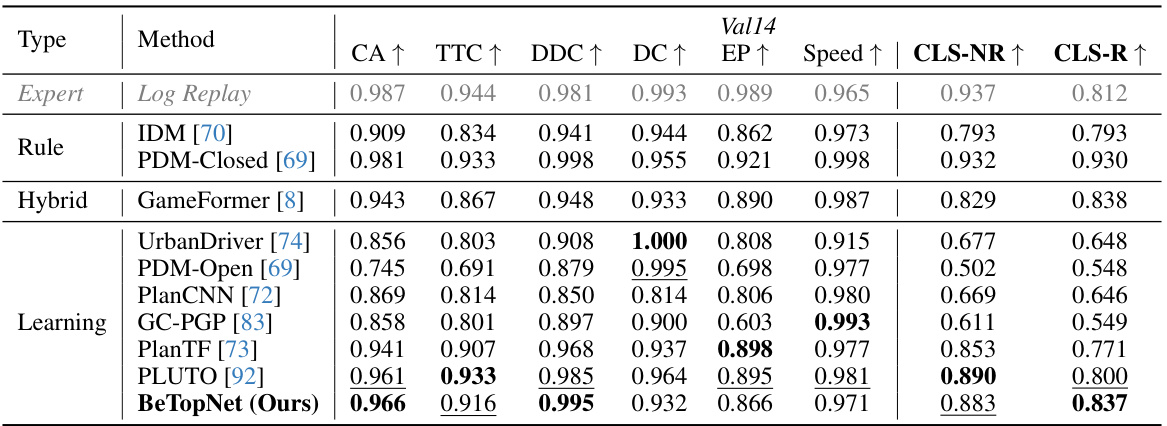
🔼 This table compares the performance of different planning methods (rule-based, hybrid, and learning-based) on the nuPlan benchmark, focusing on open-loop and closed-loop planning scenarios. The metrics used include OLS (Open-Loop Score), CLS-NR (Closed-Loop Non-Reactive score), and CLS (Closed-Loop score). BeTopNet achieves the highest average planning score across all scenarios, particularly excelling in challenging scenarios.
read the caption
Table 2: Performance comparison of open- and closed-loop planning on nuPlan benchmarks. BeTopNet positions top average planning score and non-reactive simulation amongst SOTA planning systems by all types (rule, learning, and hybrid), especially under difficult benchmarked scenarios.
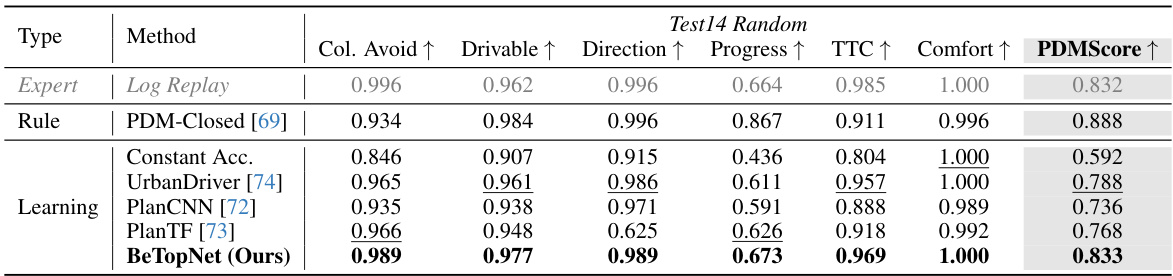
🔼 This table presents a detailed breakdown of the performance of various planning methods on the Test14-Random benchmark of the nuPlan dataset. The performance is measured using PDMScore, a composite metric that considers several factors: collision avoidance, drivability, direction accuracy, progress, time-to-collision, and comfort. The table allows for a comparison of different planning approaches, including rule-based, hybrid, and learning-based methods, highlighting BeTopNet’s performance relative to state-of-the-art techniques.
read the caption
Table 10: Detailed nuPlan closed-loop planning results (PDMScore) on Test14-Random benchmark.
🔼 This table compares the performance of BeTopNet against other state-of-the-art (SOTA) planning methods on the nuPlan benchmark. It evaluates performance using several metrics across different scenarios (Test14 Hard and Test14 Random), including open-loop and closed-loop settings, demonstrating the superior performance of BeTopNet.
read the caption
Table 2: Performance comparison of open- and closed-loop planning on nuPlan benchmarks. BeTopNet positions top average planning score and non-reactive simulation amongst SOTA planning systems by all types (rule, learning, and hybrid), especially under difficult benchmarked scenarios.

🔼 This table presents the results of marginal prediction on the Waymo Open Motion Dataset (WOMD) leaderboard. It compares the performance of BeTopNet against two other methods (MTR and EDA) across three categories: Vehicle, Pedestrian, and Cyclist. The metrics used for comparison include minimum Average Displacement Error (minADE), minimum Final Displacement Error (minFDE), Miss Rate, mean Average Precision (mAP), and Soft mAP. Lower values for minADE and minFDE and Miss Rate are better, while higher values for mAP and Soft mAP are better, indicating improved prediction accuracy.
read the caption
Table 12: Marginal predictions on WOMD Motion Leaderboard [81]. Primary metric.
🔼 This table compares the performance of BeTopNet against other state-of-the-art (SOTA) planning methods on the nuPlan benchmark. It shows the open-loop (OLS), closed-loop non-reactive (CLS-NR), and closed-loop (CLS) planning scores for different methods, categorized by type (rule-based, hybrid, learning-based). BeTopNet achieves the highest average score overall, particularly excelling in more challenging scenarios.
read the caption
Table 2: Performance comparison of open- and closed-loop planning on nuPlan benchmarks. BeTopNet positions top average planning score and non-reactive simulation amongst SOTA planning systems by all types (rule, learning, and hybrid), especially under difficult benchmarked scenarios.
🔼 This table presents the performance comparison of BeTopNet against state-of-the-art methods on the Waymo Open Motion Dataset (WOMD) for the marginal prediction task. It shows BeTopNet’s performance in terms of minADE, minFDE, Miss Rate, mAP, and Soft mAP, highlighting its superior performance even without using model ensembles or extra data.
read the caption
Table 4: Performance of marginal prediction on WOMD Motion Leaderboard. BeTopNet surpasses existing motion predictors without model ensemble or using extra data. † extra LIDAR data and pretrained model. Primary metric.

🔼 This table compares the performance of BeTopNet against other state-of-the-art (SOTA) planning methods on the nuPlan benchmark. It shows the open-loop (OLS), closed-loop non-reactive (CLS-NR), and closed-loop (CLS) planning scores for each method, as well as the average score. The results demonstrate that BeTopNet achieves the highest average planning score, particularly in challenging scenarios. This highlights BeTopNet’s superior performance in both open-loop and closed-loop planning tasks.
read the caption
Table 2: Performance comparison of open- and closed-loop planning on nuPlan benchmarks. BeTopNet positions top average planning score and non-reactive simulation amongst SOTA planning systems by all types (rule, learning, and hybrid), especially under difficult benchmarked scenarios.

🔼 This table presents the ablation study on the impact of varying temporal granularity in the BeTop model. It shows the results of experiments conducted with different numbers of time intervals (1, 2, 4, and 8) used for multi-step BeTop label generation. The metrics presented are minimum average displacement error (minADE), minimum final displacement error (minFDE), miss rate, mean average precision (mAP), inference latency, training latency, and the number of model parameters. The results indicate that finer-grained temporal resolutions slightly improve performance but at a significant increase in computational cost.
read the caption
Table 16: Effects of varied temporal granularity in BeTop. Future interactions are split into various intervals for multi-step BeTop labels. A fine-grained topology reasoning for the whole prediction horizon results in a slightly improved performance and increased computational costs simultaneously.

🔼 This table shows the performance improvement achieved by integrating BeTop with strong prediction baselines on the Waymo Open Motion Dataset (WOMD). It presents the results for various metrics such as mean Average Displacement (minADE), mean Final Displacement Error (minFDE), Miss Rate, mean Average Precision (mAP), and Soft mAP. The comparison is made between the original baselines (MTR and EDA) and their versions enhanced with BeTop. The results highlight the positive impact of BeTop in enhancing the accuracy of motion prediction.
read the caption
Table 7: Results of integrating BeTop by strong prediction baselines in WOMD benchmark.
Full paper#