TL;DR#
Human pose estimation (HPE) commonly uses heatmap regression, but this method suffers from quantization errors due to discretizing continuous heatmaps into pixel arrays. This problem is worse with smaller input images, reducing accuracy and making heatmap-based methods not significantly better than coordinate regression methods in such scenarios. This leads to suboptimal performance, particularly with lower-resolution images.
To address this, the paper introduces NerPE, a novel method that employs implicit neural representation to enable continuous heatmap regression. This method regresses confidence scores for body joints directly at any position within the image. NerPE is significantly more accurate, especially with lower-resolution input. The method also incorporates progressive coordinate decoding for higher efficiency. Experimental results on several benchmark datasets demonstrate NerPE’s superiority over existing methods, highlighting its ability to accurately estimate pose even from low-resolution inputs.
Key Takeaways#
Why does it matter?#
This paper is important because it addresses a critical limitation of existing human pose estimation methods—the quantization errors introduced by discretizing continuous heatmaps. By proposing a novel neural representation that enables continuous heatmap regression, this research opens new avenues for achieving sub-pixel localization precision and improving pose estimation performance, especially on low-resolution images. It also demonstrates the potential of implicit neural representations (INRs) in computer vision tasks.
Visual Insights#

🔼 This figure compares discrete and continuous heatmap representations used in human pose estimation. The left side shows how a Gaussian function representing a heatmap is discretized into 2D pixel arrays at different resolutions. As resolution decreases, the quantization errors become more pronounced, impacting accuracy. The right side illustrates NerPE’s approach, which uses an implicit neural representation to regress confidence scores at any position, thus avoiding discretization and improving accuracy.
read the caption
Figure 1: Comparison of discrete and continuous heatmap representations. In heatmap-based methods, the Gaussian function is discretized to satisfy the form of 2D pixel arrays. As the resolution decreases, the impact of quantization errors on positioning accuracy increases significantly. In contrast, NerPE can regress confidence scores at any position via implicit neural representation.
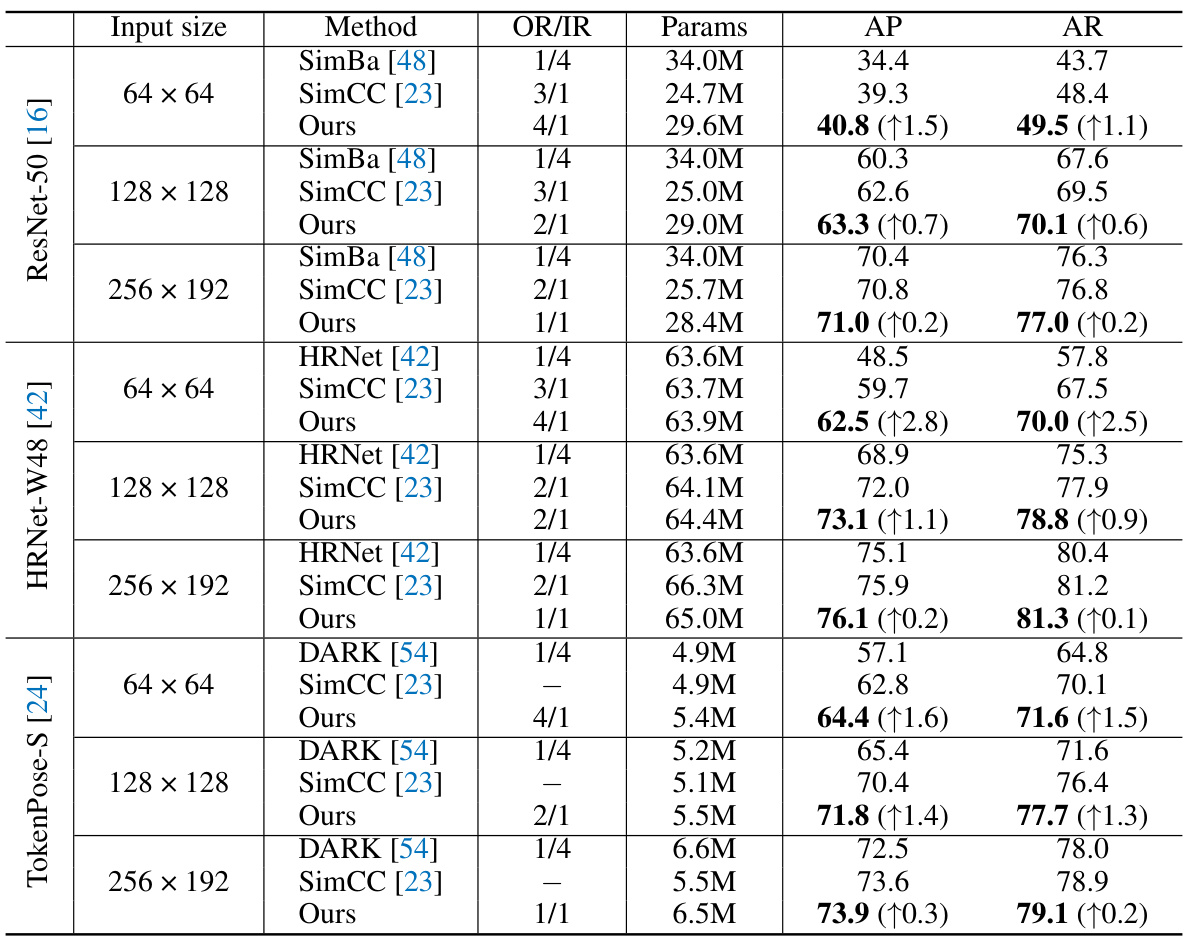
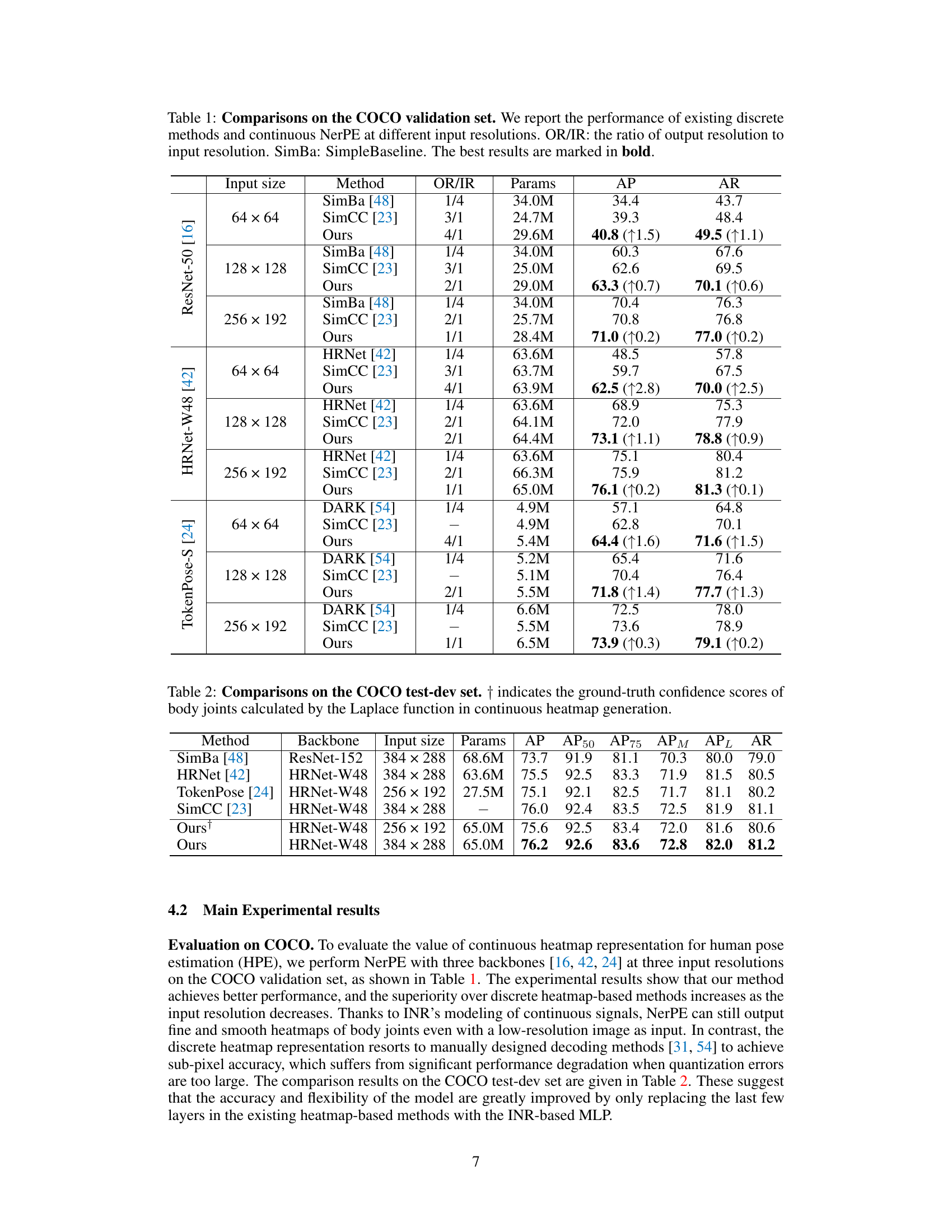
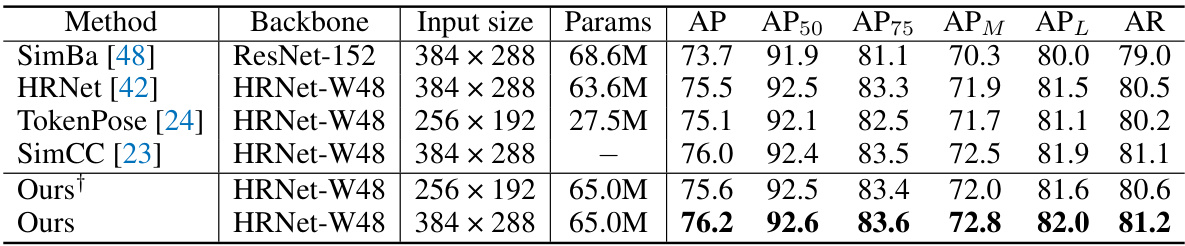
🔼 This table compares the performance of several methods (SimpleBaseline, SimCC, and the proposed NerPE) for human pose estimation on the COCO validation set using different input image resolutions (64x64, 128x128, 256x192). The results are presented in terms of Average Precision (AP) and Average Recall (AR), showing the impact of input resolution on performance. The ratio of output resolution to input resolution (OR/IR) is also included, along with the number of parameters (Params) for each model. The best performing method for each input resolution is highlighted in bold.
read the caption
Table 1: Comparisons on the COCO validation set. We report the performance of existing discrete methods and continuous NerPE at different input resolutions. OR/IR: the ratio of output resolution to input resolution. SimBa: SimpleBaseline. The best results are marked in bold.
In-depth insights#
Heatmap Regression#
Heatmap regression, a cornerstone of human pose estimation, offers a powerful approach to represent the spatial distribution of body joints. By encoding joint locations as continuous probability density functions, typically Gaussian, heatmaps provide a robust representation that gracefully handles uncertainty and ambiguity. However, traditional methods discretize these continuous heatmaps onto a pixel grid, introducing quantization errors that hinder accuracy, especially at lower resolutions. This discretization significantly limits the precision achievable, as true joint locations rarely align perfectly with pixel centers. Moreover, discretization’s reliance on fixed resolution hampers adaptability; generating heatmaps at different resolutions necessitates retraining. Hence, emerging research explores continuous heatmap regression, utilizing techniques like implicit neural representations, which promise to overcome these limitations by directly learning the continuous heatmap function, offering sub-pixel accuracy and resolution flexibility. This evolution presents a significant advancement, potentially transforming the field’s accuracy and efficiency.
NerPE Model#
The NerPE model, designed for continuous heatmap regression in human pose estimation, presents a significant advancement by leveraging implicit neural representations (INRs). This approach elegantly bypasses the limitations of traditional methods that discretize heatmaps, leading to quantization errors, especially at lower resolutions. Instead, NerPE directly regresses confidence scores for body joints at any position within the image, ensuring spatial continuity and mitigating the effects of discretization. The core innovation lies in using INRs to learn a continuous mapping from image features to confidence scores, making it adaptable to arbitrary resolutions without retraining. This flexibility is further enhanced by progressive coordinate decoding, optimizing localization speed and precision by focusing computations on high-probability areas. NerPE’s key strengths are its robustness to resolution changes and its ability to achieve sub-pixel accuracy. The decoupling of spatial resolution from model training also contributes to its efficiency and flexibility, showcasing a promising direction for future heatmap regression methods.
Continuous HPE#
Continuous Human Pose Estimation (HPE) represents a significant advancement in the field. Traditional HPE methods often discretize the pose into a grid of pixels, introducing quantization errors that limit accuracy, especially at lower resolutions. Continuous HPE addresses this by directly regressing the pose as continuous values, removing the artificial grid and allowing for sub-pixel precision. This approach leverages the continuous nature of the underlying Gaussian heatmaps, avoiding the information loss inherent in discretization. Implicit Neural Representations (INRs) are particularly well-suited for this task, as they can represent continuous functions directly. This allows for the prediction of heatmaps at arbitrary resolutions without retraining, providing flexibility and efficiency. However, challenges remain in efficiently decoding the continuous representation into precise joint locations and managing computational costs. Despite this, continuous HPE offers a promising path towards higher accuracy and more robust pose estimation across diverse input image conditions.
Coord Decoding#
Coordinate decoding, a crucial step in heatmap-based pose estimation, presents unique challenges and opportunities. Traditional methods often rely on simple argmax operations to locate keypoints, but this suffers from inherent limitations like discretization errors. Advanced techniques address this by incorporating sub-pixel accuracy improvements, such as offset prediction and Taylor expansion approximations. However, these methods can still be computationally expensive and may struggle in low-resolution scenarios. The introduction of implicit neural representations (INRs) offers a promising avenue for continuous heatmap regression, removing the need for discrete representations altogether. This leads to improved accuracy and flexibility in outputting heatmaps at various resolutions. A particularly interesting approach is to combine INRs with progressive decoding. This strategy utilizes low-resolution heatmaps for initial estimations, then refines the localization iteratively via higher-resolution areas. This method offers a balance between accuracy and computational efficiency, making it suitable for real-time applications and resource-constrained settings.
Future Works#
Future research directions stemming from this work could explore several promising avenues. Extending NerPE to 3D pose estimation would be a significant advancement, requiring the development of a 3D implicit neural representation capable of handling the complexities of depth and volume. Investigating more sophisticated neural architectures beyond simple MLPs for the decoder could unlock further improvements in accuracy and efficiency. This could involve exploring convolutional layers or transformers to better capture spatial relationships within the heatmaps. Addressing the computational cost of continuous heatmap regression remains a key challenge. Research into more efficient methods for querying and decoding continuous heatmaps is needed, especially for high-resolution applications. Finally, a more thorough exploration of different loss functions and optimization techniques could enhance the learning process. Comparative studies against other continuous representation methods would also be valuable in establishing the true potential and limitations of the approach.
More visual insights#
More on figures
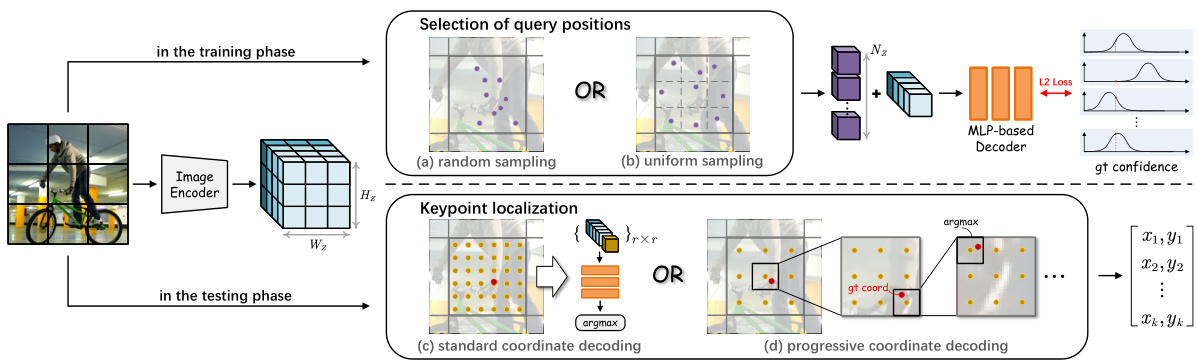
🔼 This figure illustrates the architecture of NerPE, a novel neural representation for human pose estimation. It consists of an image encoder and an MLP-based decoder. The training phase uses either random or uniform sampling to select query positions within the image. At each query position, the model calculates the confidence score for each keypoint. The testing phase offers two options for keypoint localization: standard coordinate decoding (using argmax directly) or progressive coordinate decoding (a more efficient coarse-to-fine approach). The key innovation is the use of continuous heatmap regression, enabling prediction of heatmaps at arbitrary resolution during inference.
read the caption
Figure 2: Overview of NerPE. The network structure consists of a general image encoder and an MLP-based decoder. During training, we use random or uniform sampling to pick queried positions, and calculate their confidence scores via continuous heatmap generation. During testing, we can obtain the predicted heatmaps at arbitrary resolution by standard and progressive coordinate decoding.

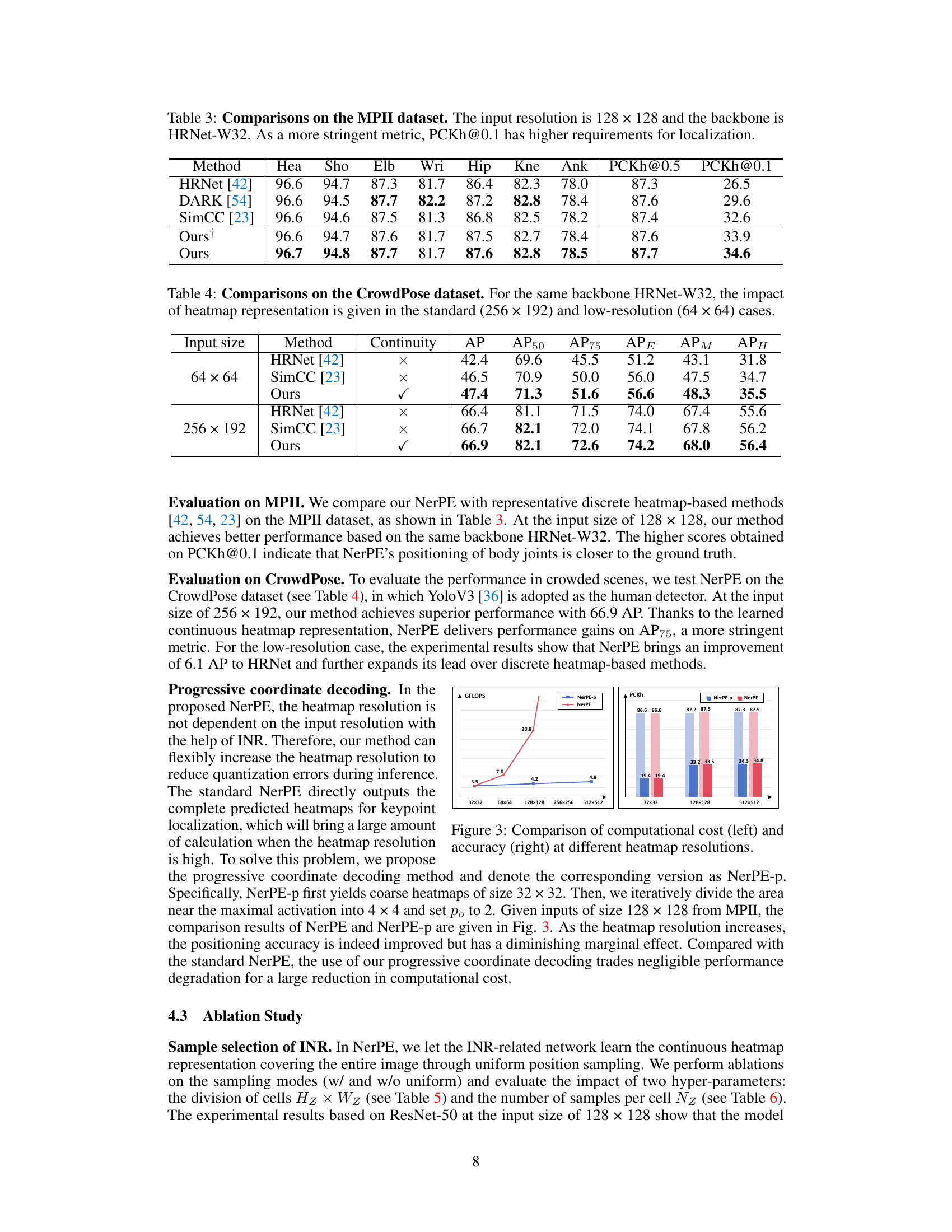
🔼 This figure shows the trade-off between computational cost and accuracy when using different heatmap resolutions in the NerPE model. The left panel shows that computational cost (GFLOPS) increases significantly with higher resolution, while the right panel shows that accuracy (PCKh) improves marginally after a certain point. NerPE-p, a progressive coordinate decoding method, is designed to improve efficiency by only calculating the necessary part of the high-resolution heatmap, achieving good accuracy with lower computational cost. This demonstrates the benefit of the progressive decoding strategy for balancing efficiency and accuracy.
read the caption
Figure 3: Comparison of computational cost (left) and accuracy (right) at different heatmap resolutions.
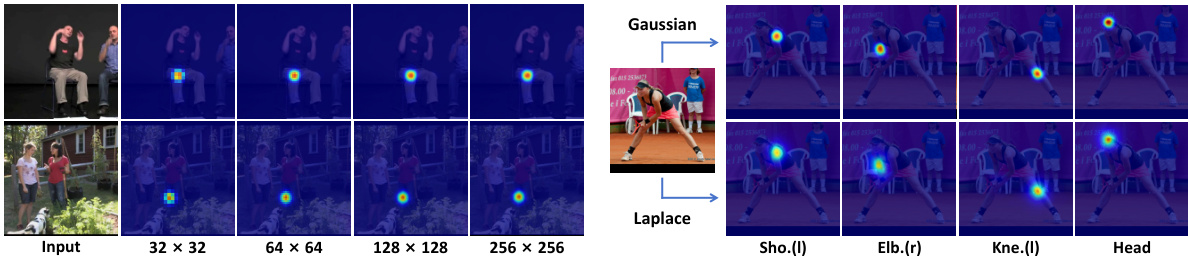
🔼 This figure visualizes the output of NerPE at different heatmap resolutions (32x32, 64x64, 128x128, 256x256). It demonstrates the flexibility of NerPE in generating heatmaps at various resolutions without changing network architecture or retraining. The heatmaps highlight the keypoint locations with different levels of detail.
read the caption
Figure 4: The predicted heatmap of knee(r) output by NerPE at different heatmap resolutions.
🔼 The figure shows a comparison between traditional discrete heatmap representation and the proposed continuous heatmap representation using implicit neural representation (INR). In discrete heatmaps, Gaussian functions are discretized to 2D pixel arrays, leading to quantization errors that affect accuracy, especially at low resolutions. NerPE, in contrast, directly regresses confidence scores at any position within the image, avoiding discretization and improving accuracy.
read the caption
Figure 1: Comparison of discrete and continuous heatmap representations. In heatmap-based methods, the Gaussian function is discretized to satisfy the form of 2D pixel arrays. As the resolution decreases, the impact of quantization errors on positioning accuracy increases significantly. In contrast, NerPE can regress confidence scores at any position via implicit neural representation.
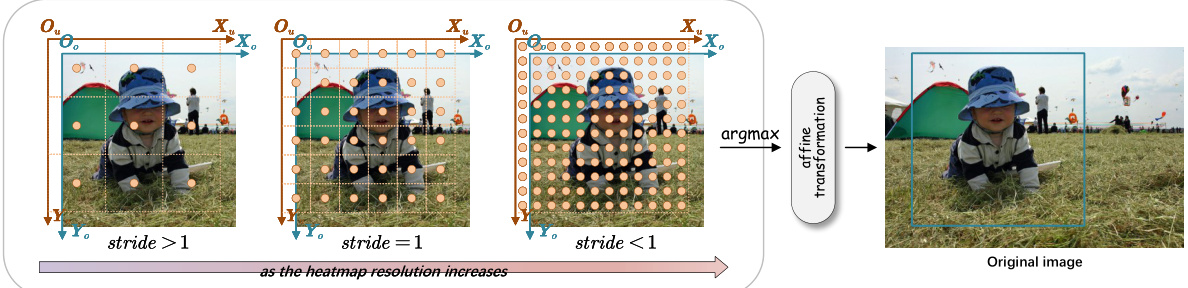
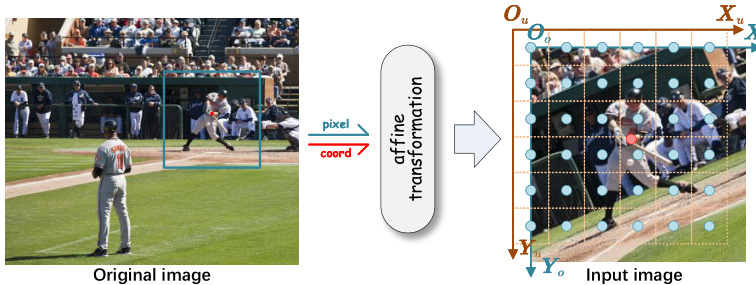
🔼 This figure shows the post-processing steps for coordinate decoding in NerPE. After obtaining 0-based integral indices from the predicted heatmaps using argmax, these indices are converted to coordinates in a normalized coordinate system (Ou-Xu-Yu). Finally, an affine transformation maps these coordinates back to the original image’s coordinate system (O0-X0-Y0).
read the caption
Figure A2: Post-processing of NerPE. Since the affine transformation is established between the cropped image and the original image, we need to convert the 0-based integral indices calculated by argmax into the coordinates in O0-X0-Y0.
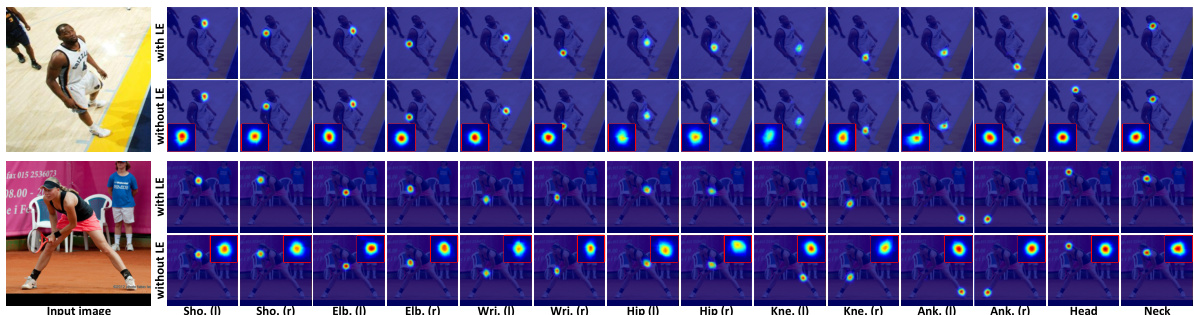
🔼 This figure visualizes the impact of the local ensemble technique used in NerPE. The top row shows heatmaps generated with the local ensemble, exhibiting smooth transitions between cells. The bottom row shows heatmaps generated without the local ensemble, where discontinuities are evident at cell boundaries. This highlights the importance of the local ensemble in maintaining the continuity of the heatmap representation, which is crucial for accurate keypoint localization.
read the caption
Figure A3: Visualization of qualitative ablation on local ensemble. The prediction of activation peaks is the key to heatmap-based pose estimation. When the activation peaks appear at the junction between cells, the confidence scores show obvious discontinuity without local ensemble (LE).
More on tables
🔼 This table presents a comparison of the performance of several human pose estimation methods on the COCO validation set. It shows the Average Precision (AP) and Average Recall (AR) metrics for different input image resolutions (64x64, 128x128, 256x192 pixels) and output resolutions relative to input resolutions (OR/IR). The methods compared include Simple Baseline (SimBa), Simple Coordinate Classification (SimCC), and the proposed NerPE method. The table highlights the impact of input resolution and the superiority of NerPE in achieving high accuracy even at low resolutions.
read the caption
Table 1: Comparisons on the COCO validation set. We report the performance of existing discrete methods and continuous NerPE at different input resolutions. OR/IR: the ratio of output resolution to input resolution. SimBa: SimpleBaseline. The best results are marked in bold.

🔼 This table presents the performance comparison of different pose estimation methods on the MPII dataset. The input image resolution is 128x128 pixels, and the HRNet-W32 model is used as the backbone network. The table shows the Percentage of Correct Keypoints (PCKh) at thresholds of 0.5 and 0.1 for different body joints (Head, Shoulder, Elbow, Wrist, Hip, Knee, Ankle). PCKh@0.1 is a stricter metric as it requires higher localization accuracy.
read the caption
Table 3: Comparisons on the MPII dataset. The input resolution is 128 × 128 and the backbone is HRNet-W32. As a more stringent metric, PCKh@0.1 has higher requirements for localization.
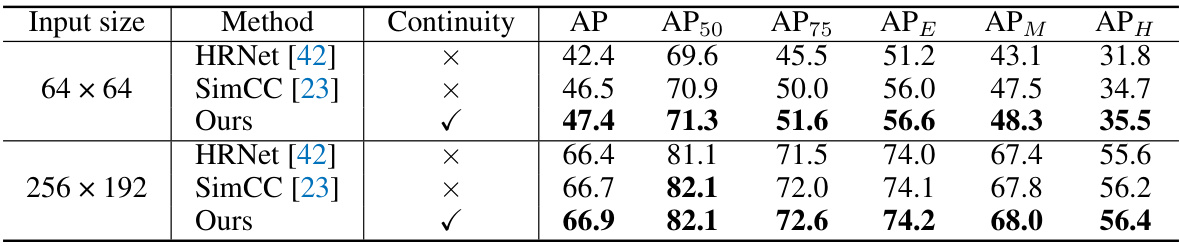
🔼 This table compares the performance of different methods on the CrowdPose dataset, focusing on the impact of heatmap representation. It shows results for both standard (256x192) and low-resolution (64x64) input images, using HRNet-W32 as the backbone network. The ‘Continuity’ column indicates whether the method uses continuous or discrete heatmap representation. The remaining columns represent various metrics (AP, AP50, AP75, APE, APM, APH) used to evaluate the performance of human pose estimation.
read the caption
Table 4: Comparisons on the CrowdPose dataset. For the same backbone HRNet-W32, the impact of heatmap representation is given in the standard (256 × 192) and low-resolution (64 × 64) cases.
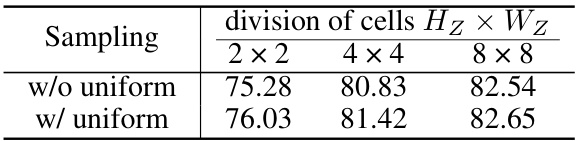
🔼 This ablation study investigates the impact of different cell divisions (2x2, 4x4, 8x8) on the model’s performance, specifically the PCKh@0.5 metric on the MPII dataset using ResNet-50 as the backbone. The number of samples per cell was kept constant at 64. The results compare the performance with and without uniform sampling.
read the caption
Table 5: Ablation study on different divisions of cells. The number of samples per cell is set to 64 on MPII (PCKh@0.5), using ResNet-50.
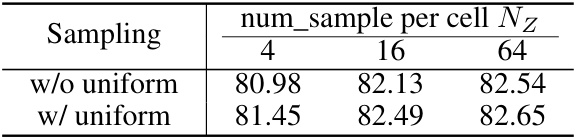
🔼 This ablation study investigates the effect of varying the number of samples per cell on the model’s performance. The study uses the MPII dataset and ResNet-50 as the backbone, with cells divided into an 8x8 grid. Two sampling methods are compared: with and without uniform sampling. The results show PCKh@0.5 scores for different sample counts (4, 16, and 64).
read the caption
Table 6: Ablation study on different number of samples per cell. The division of cells is set to 8 × 8 on MPII (PCKh@0.5), using ResNet-50.
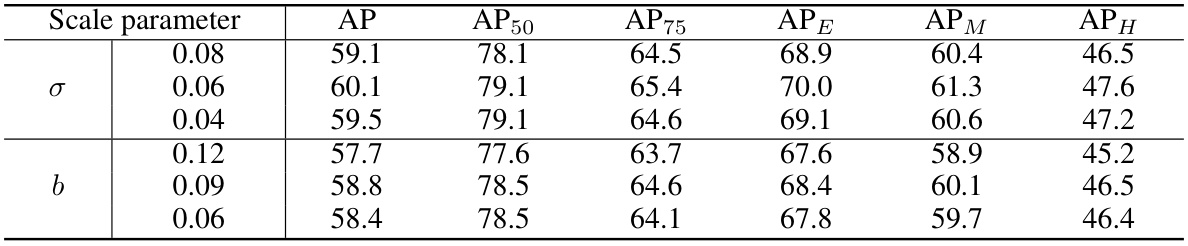
🔼 This table presents the ablation study on the scale parameters (σ and b) used in the continuous heatmap generation process within the NerPE model. The experiments were conducted on the CrowdPose dataset with 128x128 input resolution, using the HRNet-W32 backbone. Different values of σ (for Gaussian distribution) and b (for Laplace distribution) were tested, and the resulting Average Precision (AP) and its variants (AP50, AP75, APE, APM, APH) are reported to show the impact of these parameters on the model’s performance.
read the caption
Table 7: Ablation study on scale parameters for continuous heatmap generation. Experiments are performed on CrowdPose with input resolutions of 128 × 128. The backbone is HRNet-W32.
Full paper#