TL;DR#
Current data-driven autonomous driving simulators struggle with realistic traffic agent behavior modeling. Existing approaches often use encoder-decoder architectures, which are complex and inefficient in data utilization. The manual separation of historical and future trajectories also hinders performance.
BehaviorGPT uses a homogenous, fully autoregressive Transformer to address these shortcomings. It introduces a Next-Patch Prediction Paradigm (NP3) that improves the prediction of trajectory patches at the patch level, capturing long-range interactions. The method shows significant improvement in realism scores compared with other top models while using fewer parameters (only 3M). This innovative approach won the 2024 Waymo Open Sim Agents Challenge.
Key Takeaways#
Why does it matter?#
This paper is crucial for researchers in autonomous driving and AI due to its novel approach to agent simulation. It offers significant improvements in realism and efficiency, pushing the boundaries of current techniques. By introducing a new paradigm and achieving top results in a major challenge, it sets a new benchmark and sparks further research into more realistic and efficient AI-driven simulations. The open-sourcing of the code also greatly benefits the community.
Visual Insights#
🔼 This figure illustrates the Next-Patch Prediction Paradigm (NP3) used in BehaviorGPT. It shows how the model is trained to predict future trajectory patches (groups of consecutive time steps) rather than individual time steps. Different patch sizes (1, 5, and 10 time steps) are shown, highlighting the model’s ability to capture long-range spatial-temporal dependencies. The dark red capsules represent the current state, faded red capsules the past states, and grey circles masked future states the model must predict.
read the caption
Figure 1: Next-Patch Prediction Paradigm with patch sizes of 1, 5, and 10 time steps for trajectories sampled at 10 Hz. The capsules in dark red represent the agent states at the current time step t, while the faded red capsules indicate agents' past states. The grey circles represent the masked agent states required for generation. Our approach groups multi-step agent states as patches, demanding each patch to predict the subsequent patch during training.

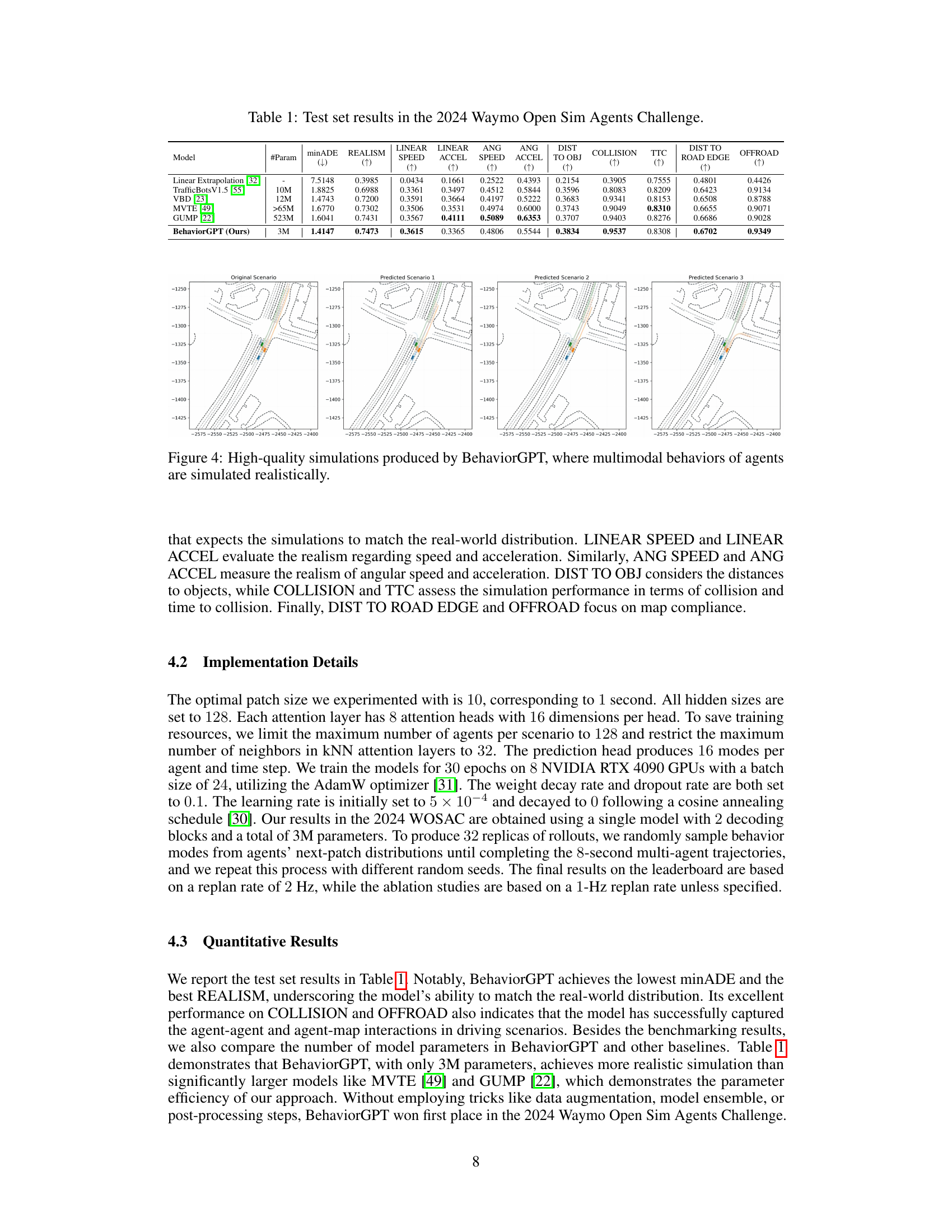
🔼 This table presents a comparison of the performance of BehaviorGPT against other state-of-the-art models on the 2024 Waymo Open Sim Agents Challenge test set. The comparison includes various metrics such as minimum average displacement error (minADE), realism score (REALISM), and several other metrics that assess aspects of agent behavior like speed, acceleration, and collision avoidance. The table also shows the number of model parameters for each method.
read the caption
Table 1: Test set results in the 2024 Waymo Open Sim Agents Challenge.
In-depth insights#
Autoregressive Sim#
An autoregressive simulator, in the context of autonomous driving, would model the sequential behavior of traffic agents by predicting future states based on past observations. This approach, unlike encoder-decoder methods, processes the entire trajectory in a single pass. The primary advantage lies in its potential for improved efficiency and data utilization, as it avoids the artificial separation of historical and future data. However, a major challenge inherent in autoregressive modeling is the accumulation of errors over time. The model’s prediction at each time step relies on the accuracy of preceding predictions, leading to a compounding effect where small initial errors can escalate significantly. Strategies to mitigate this limitation, like using a patch-level prediction paradigm (NP3) where the model predicts a sequence of future states instead of individual ones, are crucial for realism. Success would involve efficiently capturing long-range spatial-temporal dependencies and handling the multi-modal nature of traffic behavior. A successful autoregressive simulator would achieve high realism while maintaining computational efficiency, surpassing current methods in terms of accuracy and data efficiency. A key area of focus would be how to leverage the advantages of autoregressive modeling while effectively addressing the compounding error issue.
Next-Patch Paradigm#
The “Next-Patch Prediction Paradigm” presents a novel approach to address the limitations of traditional autoregressive models in multi-agent trajectory prediction. Instead of predicting single time steps, it proposes predicting entire patches of trajectories, encompassing multiple time steps. This shift tackles the compounding error problem inherent in autoregressive methods where small errors accumulate over time, leading to increasingly unrealistic predictions. By focusing on patches, the model learns higher-level spatial-temporal relationships and avoids getting stuck in trivial, short-sighted solutions. This patch-level reasoning improves the long-range dependency modeling, enabling the model to better capture the complex interactions between multiple agents in a dynamic environment. The paradigm’s effectiveness is demonstrated by its superior performance in the Waymo Open Sim Agents Challenge, highlighting its potential for advancing realistic multi-agent simulations in autonomous driving and related fields. The use of patches allows for more efficient data utilization, enabling the model to learn more effectively from the available data.
Relative Spacetime#
The concept of ‘Relative Spacetime’ in the context of autonomous driving simulation is crucial for accurately modeling agent behavior. A core challenge is representing agent interactions and their relationship to the environment in a way that’s computationally efficient and generalizes well. Relative spacetime representations offer a powerful solution, avoiding the need for fixed coordinate systems, instead focusing on relationships between agents and map elements. This approach is particularly beneficial in scenarios with multiple agents, where using a single global coordinate frame can be unnecessarily complex. By encoding relative distances, angles, and time differences, the model learns more robust spatial-temporal patterns, ultimately leading to more realistic and predictable agent simulations. This approach also improves efficiency, since the model is not burdened by calculating and encoding absolute positions repeatedly, making the method more scalable and adaptable. However, it’s essential to consider the nuances of designing effective relative encoding schemes. Careful selection of relevant features and an appropriate transformation mechanism is critical for achieving high simulation fidelity. The success of such approaches is highly dependent on the representational power and robustness of the chosen encoding method, making it a key area of further research and innovation within this field.
Triple-Attention Model#
The Triple-Attention mechanism is a key innovation designed to capture the intricate relationships within a multi-agent traffic scenario. By incorporating three distinct attention modules—temporal self-attention, agent-map cross-attention, and agent-agent self-attention—the model effectively integrates various factors influencing agent behavior. Temporal self-attention focuses on the sequential dependencies within each agent’s trajectory, modeling the temporal dynamics. Agent-map cross-attention captures the influence of the environment, particularly the road map, on agent actions, incorporating contextual information crucial for realistic simulation. Finally, agent-agent self-attention models the social interactions between agents, representing the complex interplay among multiple actors. This design demonstrates a thoughtful approach by considering various elements that influence agent behavior in a complete and holistic manner, leading to significantly enhanced prediction accuracy and realism in the simulation.
Future of Sim#
The “Future of Sim” in autonomous driving simulation hinges on several key advancements. High-fidelity simulation, moving beyond simplistic models to incorporate realistic physics, sensor noise, and environmental variability, will be critical for robust testing and validation. Integration of diverse data sources, including real-world driving data, high-definition maps, and sensor simulations, will allow for more realistic and comprehensive scenarios. Advanced AI techniques, such as reinforcement learning and generative models, will further enhance the sophistication of simulated agents, leading to more unpredictable and challenging interactions. A shift towards modular and scalable platforms will be crucial, allowing for customization and expansion to meet evolving needs. Ultimately, the “Future of Sim” lies in its ability to bridge the gap between virtual and real-world testing, enabling a more efficient and effective development process for safer and more reliable autonomous vehicles.
More visual insights#
More on figures
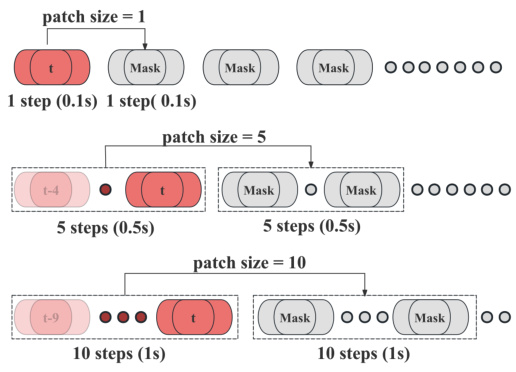
🔼 This figure illustrates the overall architecture of the BehaviorGPT model. It shows how agent trajectories and map data are processed. First, agent data and map data are separately embedded. Then, trajectory patches are created, which are fed into a Transformer decoder along with map embeddings. This decoder uses a triple-attention mechanism to incorporate temporal, agent-map, and agent-agent interactions. Finally, the decoder outputs predictions for the position, velocity, and yaw angle of each agent in subsequent trajectory patches.
read the caption
Figure 2: Overview of BehaviorGPT. The model takes as input the agent trajectories and the map elements, which are converted into the embeddings of trajectory patches and map polyline segments, respectively. These embeddings are fed into a Transformer decoder for autoregressive modeling based on next-patch prediction, in which the model is trained to generate the positions, velocities, and yaw angles of trajectory patches.

🔼 This figure illustrates the triple-attention mechanism in BehaviorGPT. It shows how the model processes information from three perspectives to predict agent behavior: (a) Temporal Self-Attention considers the sequential relationship between an agent’s past trajectory patches. (b) Agent-Map Cross-Attention focuses on the interaction between agents and the map context, using a k-nearest neighbor approach to efficiently manage the large number of map elements. (c) Agent-Agent Self-Attention models the social interactions between agents, also using a k-nearest neighbor strategy for computational efficiency. Each attention mechanism uses multi-head self-attention with relative positional embeddings to capture spatial-temporal relationships.
read the caption
Figure 3: Triple Attention applies attention mechanisms to model (a) agents' sequential behaviors, (b) agents' relationships with the map context, and (c) the interactions among agents.

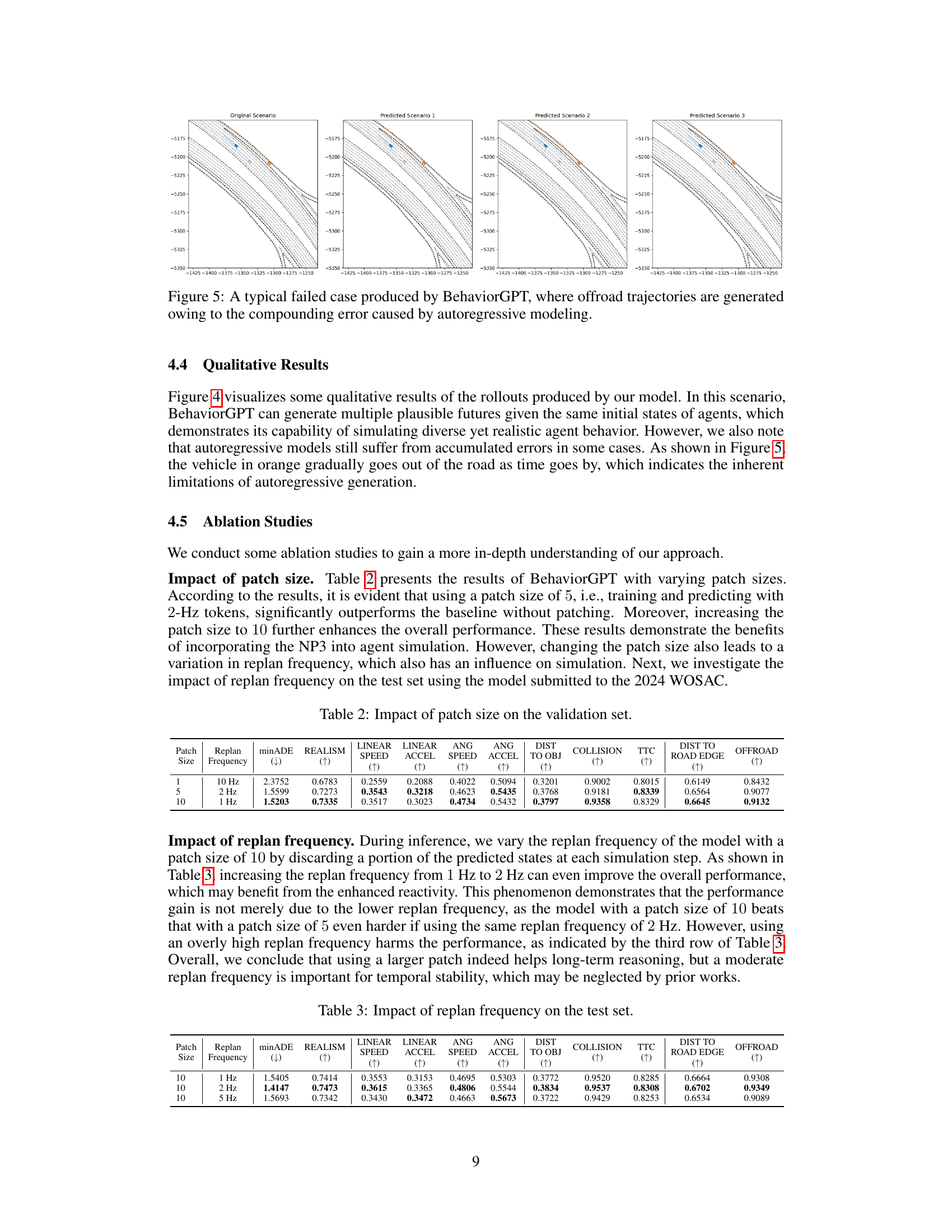
🔼 This figure showcases example simulations generated by the BehaviorGPT model. It visually compares an original scenario with three different predicted scenarios generated by the model. The maps are consistent across all four images. The plots demonstrate that BehaviorGPT can create diverse and realistic simulations of multi-agent traffic behaviors by producing multiple plausible futures (multiple predicted scenarios) from the same starting point (original scenario). This highlights the model’s ability to handle and generate a range of possible outcomes and not just a single, deterministic prediction.
read the caption
Figure 4: High-quality simulations produced by BehaviorGPT, where multimodal behaviors of agents are simulated realistically.

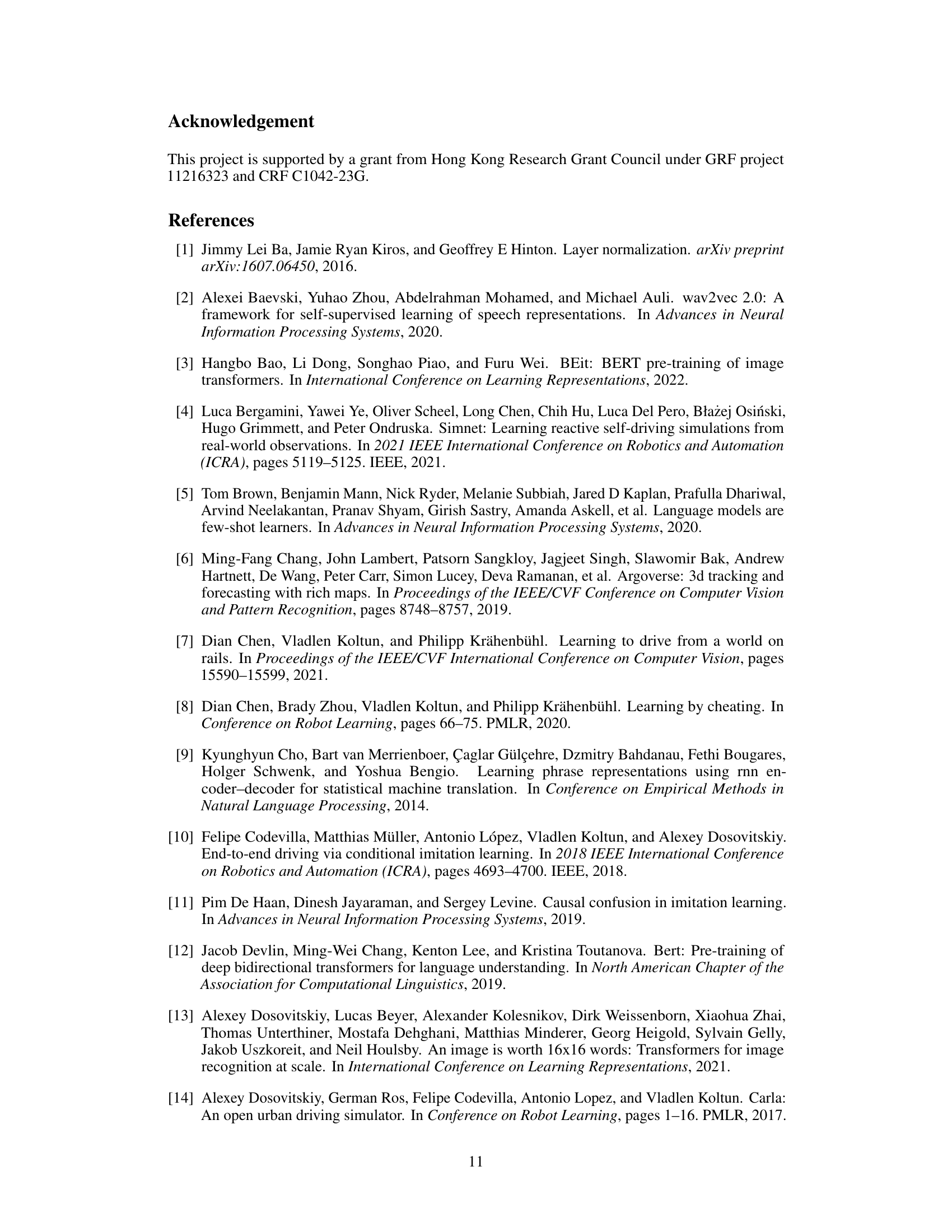
🔼 This figure showcases a failure case of the BehaviorGPT model. The model generates trajectories that deviate from the road, resulting in ‘off-road’ driving behavior. This failure is attributed to the compounding errors inherent in the autoregressive modeling approach, where small prediction errors accumulate over time leading to increasingly significant deviations from the expected path. The image highlights the limitations of solely relying on autoregressive prediction for traffic simulation without incorporating mechanisms to handle error propagation or long-range interactions.
read the caption
Figure 5: A typical failed case produced by BehaviorGPT, where offroad trajectories are generated owing to the compounding error caused by autoregressive modeling.
More on tables

🔼 This table presents the ablation study result of using different patch sizes in BehaviorGPT model. It shows that using a patch size of 5 (2Hz replan frequency) significantly outperforms the baseline model without patching. Increasing the patch size to 10 (1Hz replan frequency) further enhances performance across multiple metrics, such as minADE and REALISM, indicating the benefits of the Next-Patch Prediction Paradigm (NP3). However, there is an interaction between patch size and replan frequency, shown by the model with patch size 10 outperforming even the 2Hz model with patch size 5.
read the caption
Table 2: Impact of patch size on the validation set.

🔼 This table presents the results of the BehaviorGPT model on the test set with varying replan frequencies (1Hz, 2Hz, and 5Hz) while maintaining a fixed patch size of 10. The metrics evaluated include minADE, REALISM, LINEAR SPEED, LINEAR ACCEL, ANG SPEED, ANG ACCEL, DIST TO OBJ, COLLISION, TTC, DIST TO ROAD EDGE, and OFFROAD. It demonstrates the effect of replan frequency on the model’s performance across various aspects of agent simulation realism and safety.
read the caption
Table 3: Impact of replan frequency on the test set.
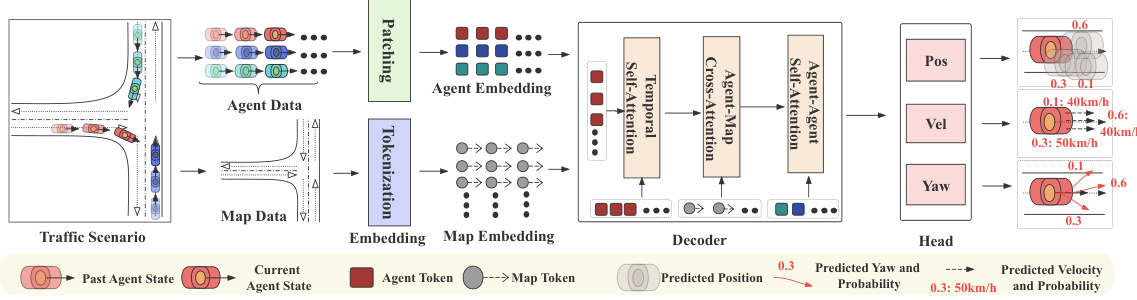
🔼 This table presents the ablation study result on the validation set by removing all agent-agent self-attention layers. The result shows that modeling the interactions among agents can boost minADE and REALISM. Specifically, the realism in terms of collision is improved by 34.66% when employing agent-agent self-attention.
read the caption
Table 4: Impact of agent-agent self-attention on the validation set.

🔼 This ablation study analyzes the effect of removing agent-agent self-attention layers from the model. By comparing the model’s performance with and without these layers, the impact of multi-agent interaction modeling on the overall performance (minADE and REALISM) is evaluated. The results highlight the importance of modeling the interactions between agents for achieving higher realism in the simulation.
read the caption
Table 4: Impact of agent-agent self-attention on the validation set.

🔼 This table presents the results of testing BehaviorGPT’s ability to extrapolate from shorter training sequences (5 seconds) to longer inference sequences (9.1 seconds). It compares the performance metrics (minADE, REALISM, and various aspects of driving realism) of the model trained on 5-second sequences against the model trained on the full 9.1-second sequences. This demonstrates the model’s ability to generate realistic longer trajectories even when trained on shorter ones.
read the caption
Table 8: Extrapolation ability to generate longer sequences.
Full paper#