↗ OpenReview ↗ NeurIPS Homepage ↗ Chat
TL;DR#
Radar semantic segmentation (RSS) is crucial for autonomous driving and surveillance, but existing deep learning methods struggle with inconsistent target responses and noisy data. The PeakConv (PKC) method offered improvements by focusing on peak response characteristics but was limited by a fixed receptive field. This limitation hindered its ability to handle variations in target signatures and noise distributions, impacting performance.
To overcome this, the researchers propose AdaPKC, an enhanced version of PKC that uses an adaptive receptive field. AdaPKC dynamically adjusts its receptive field based on data characteristics, leading to significant improvements in RSS performance. Experiments using real-world radar datasets demonstrate that AdaPKC outperforms existing methods. The fine-tuning strategy further enhances the AdaPKC’s performance.
Key Takeaways#
Why does it matter?#
This paper is important because it significantly improves radar semantic segmentation, a crucial task for autonomous driving and surveillance. The proposed AdaPKC method surpasses state-of-the-art techniques by dynamically adjusting the receptive field of convolutional neural networks, enhancing robustness and accuracy in complex real-world scenarios. This opens avenues for further research into adaptive convolution operators for other signal processing tasks and boosts the potential of radar technology in various applications. The improved accuracy and robustness directly impact the safety and efficiency of autonomous systems and surveillance technologies.
Visual Insights#

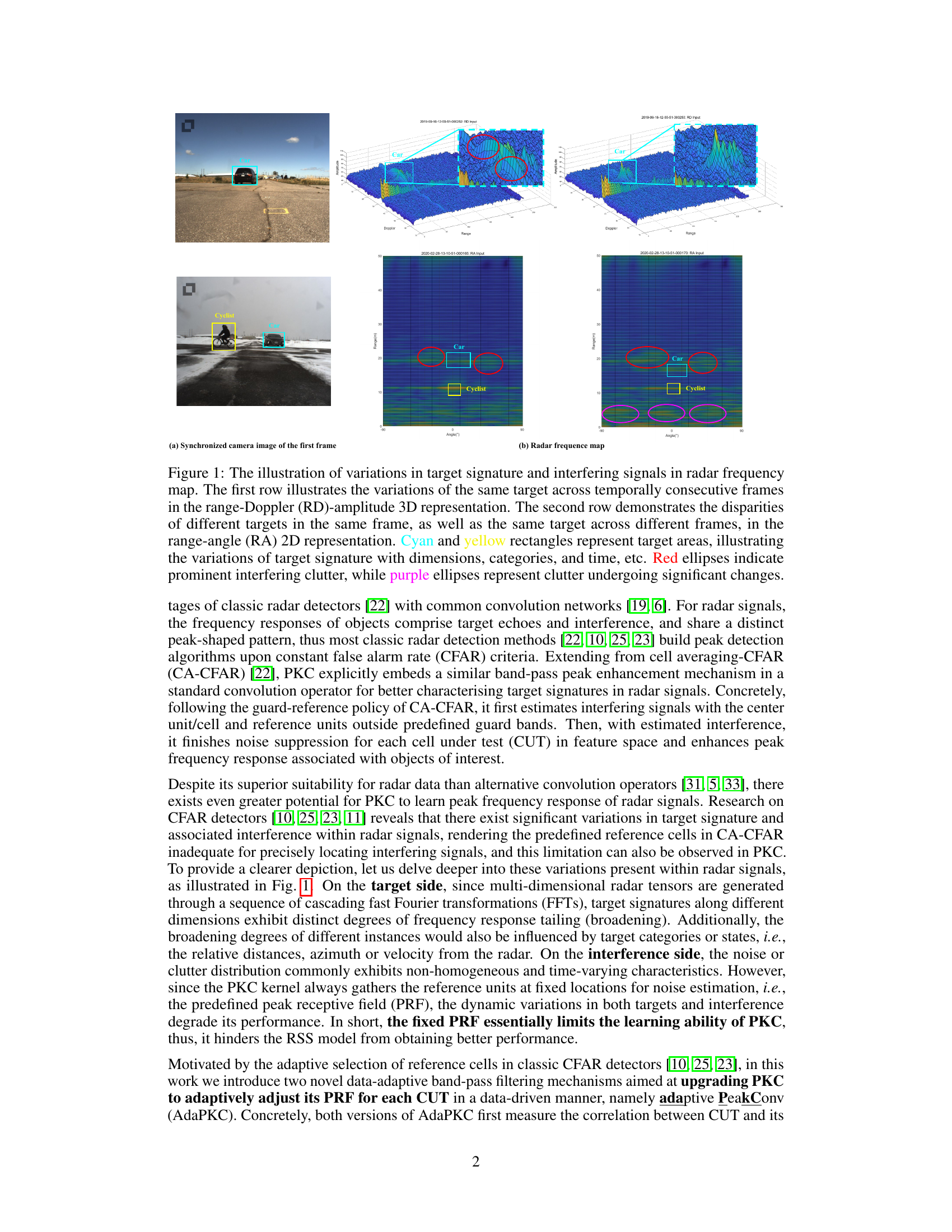
This figure shows how radar signals vary over time and between different objects. The top row displays how the same object’s radar signature changes across several consecutive frames in a 3D representation (range, Doppler, amplitude). The bottom row shows how different objects, and the same object at different times, have different signatures in a 2D representation (range, angle). Key features like target areas, interference (clutter), and changing clutter are highlighted.
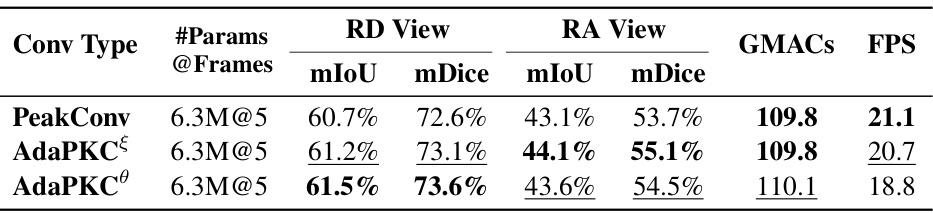
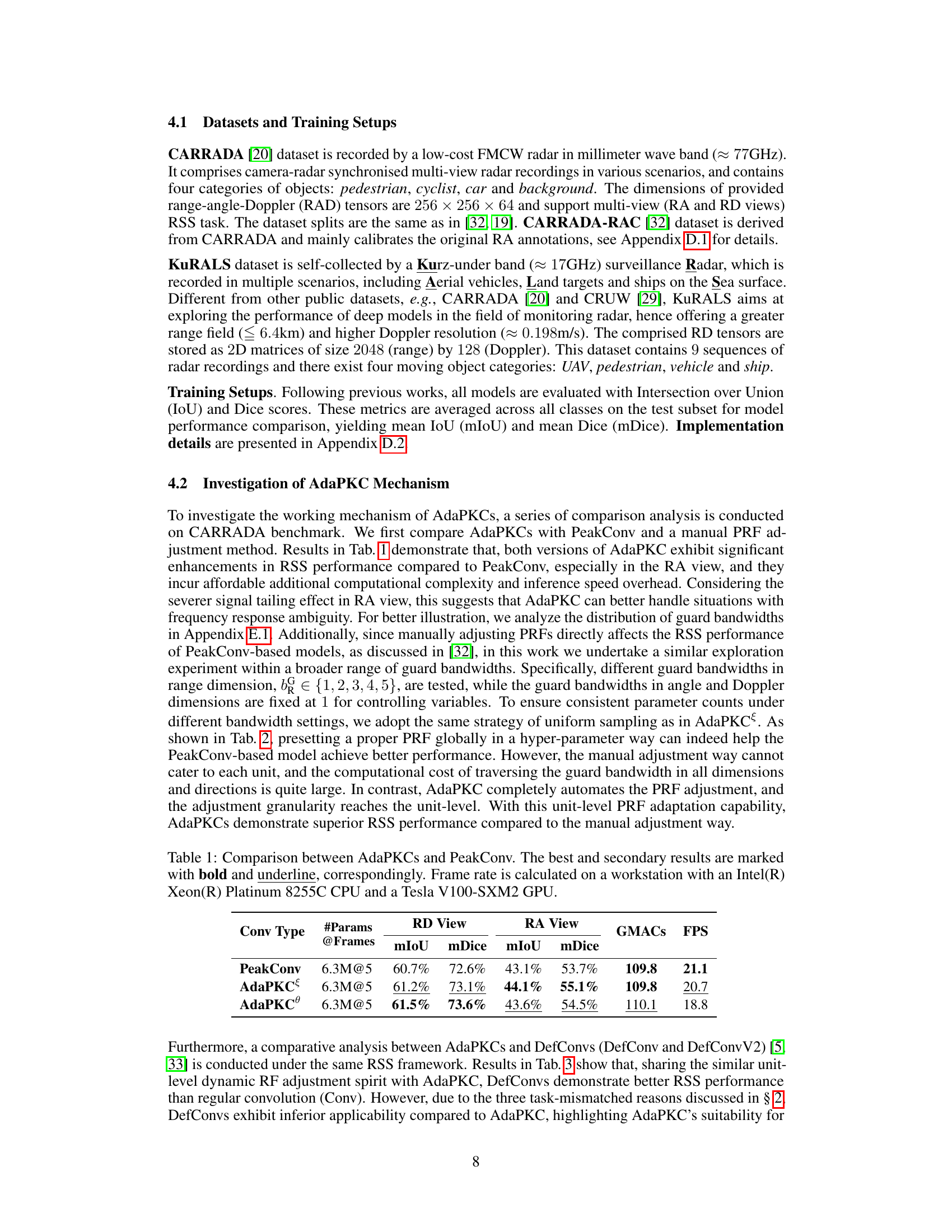
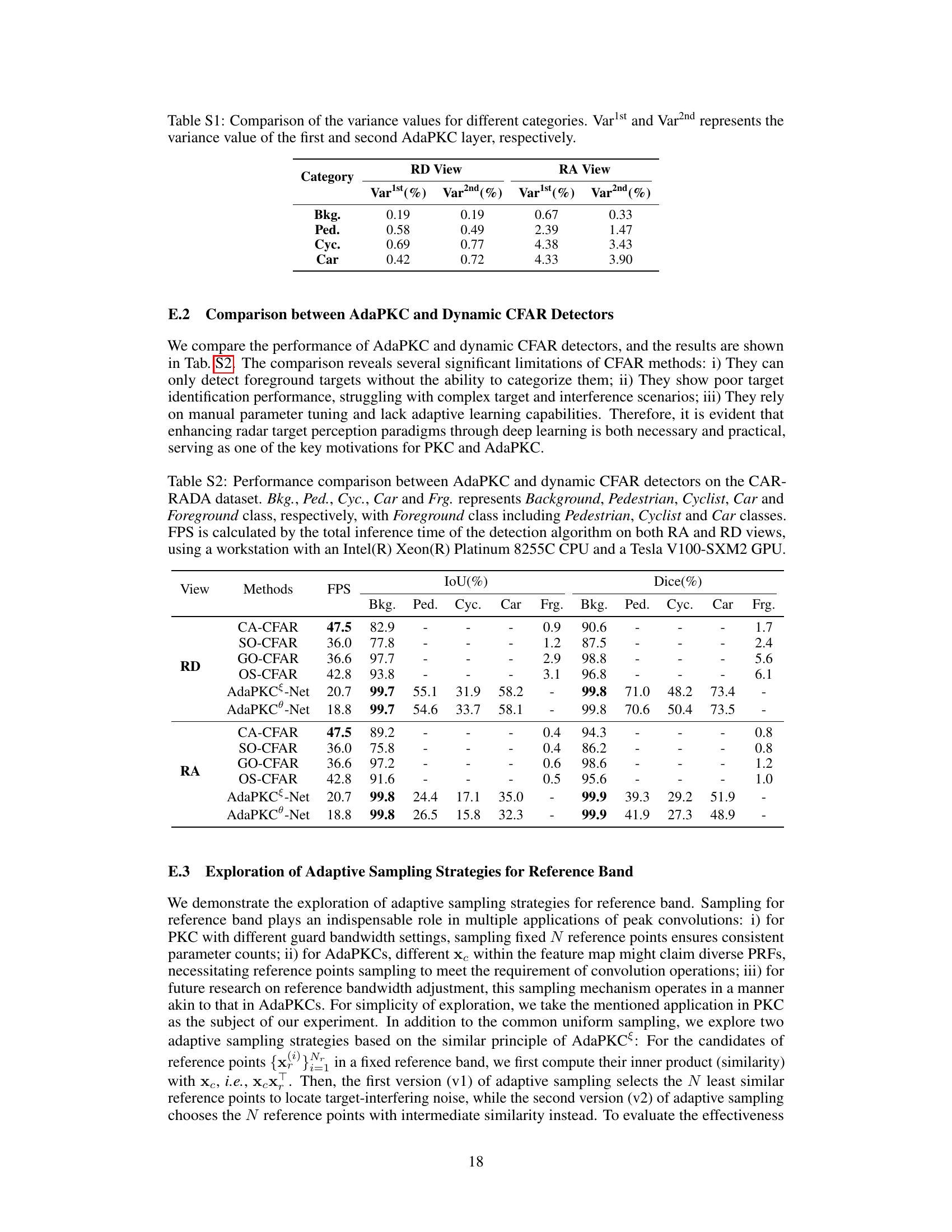
This table compares the performance of AdaPKC and its two variants (AdaPKCs and AdaPKCθ) against the original PeakConv method. The comparison includes model parameters, frames per second (FPS), and the mean Intersection over Union (mIoU) and Dice scores for both Range-Doppler (RD) and Range-Angle (RA) views. The results highlight the improved performance of AdaPKC compared to PeakConv, particularly in the RA view.
In-depth insights#
Adaptive PeakConv#
Adaptive PeakConv represents a significant advancement in radar semantic segmentation. The core innovation lies in its dynamic adjustment of the receptive field, unlike traditional methods with fixed parameters. This adaptability is crucial because radar signals exhibit variations in target signatures and interference levels. By adaptively selecting relevant reference units for convolution, Adaptive PeakConv effectively addresses challenges like inconsistent target response broadening and non-homogeneous noise distribution. This results in improved accuracy and robustness, particularly noticeable in scenarios with complex signal characteristics. Two main versions are presented, differing in the mechanism of adaptive receptive field determination: one metric-based and one learning-based. Both achieve superior performance to standard PeakConv, highlighting the value of the adaptive approach. Furthermore, a novel fine-tuning strategy enhances results by intelligently switching between adaptive and fixed receptive fields based on model confidence, optimizing performance and efficiency.
AdaPKC Variants#
The concept of “AdaPKC Variants” suggests exploring different versions of the AdaPKC model, each with unique adaptations for handling the inherent variability in radar data. A key aspect would be the adaptive peak receptive field (PRF), where different methods of dynamically adjusting the PRF could be compared. One variant might use a metric-based approach, determining the optimal PRF based on quantitative measures of signal characteristics. Another might use a learning-based approach, training a neural network to predict the optimal PRF directly from the input data. Each variant would require careful evaluation to assess its strengths and weaknesses in different radar scenarios. Comparisons would need to consider factors such as computational cost, accuracy, and robustness to noise, clutter, and variations in target signatures. The existence of multiple variants allows for a more nuanced exploration of the AdaPKC framework, potentially leading to more versatile and robust radar semantic segmentation models.
RSS Performance#
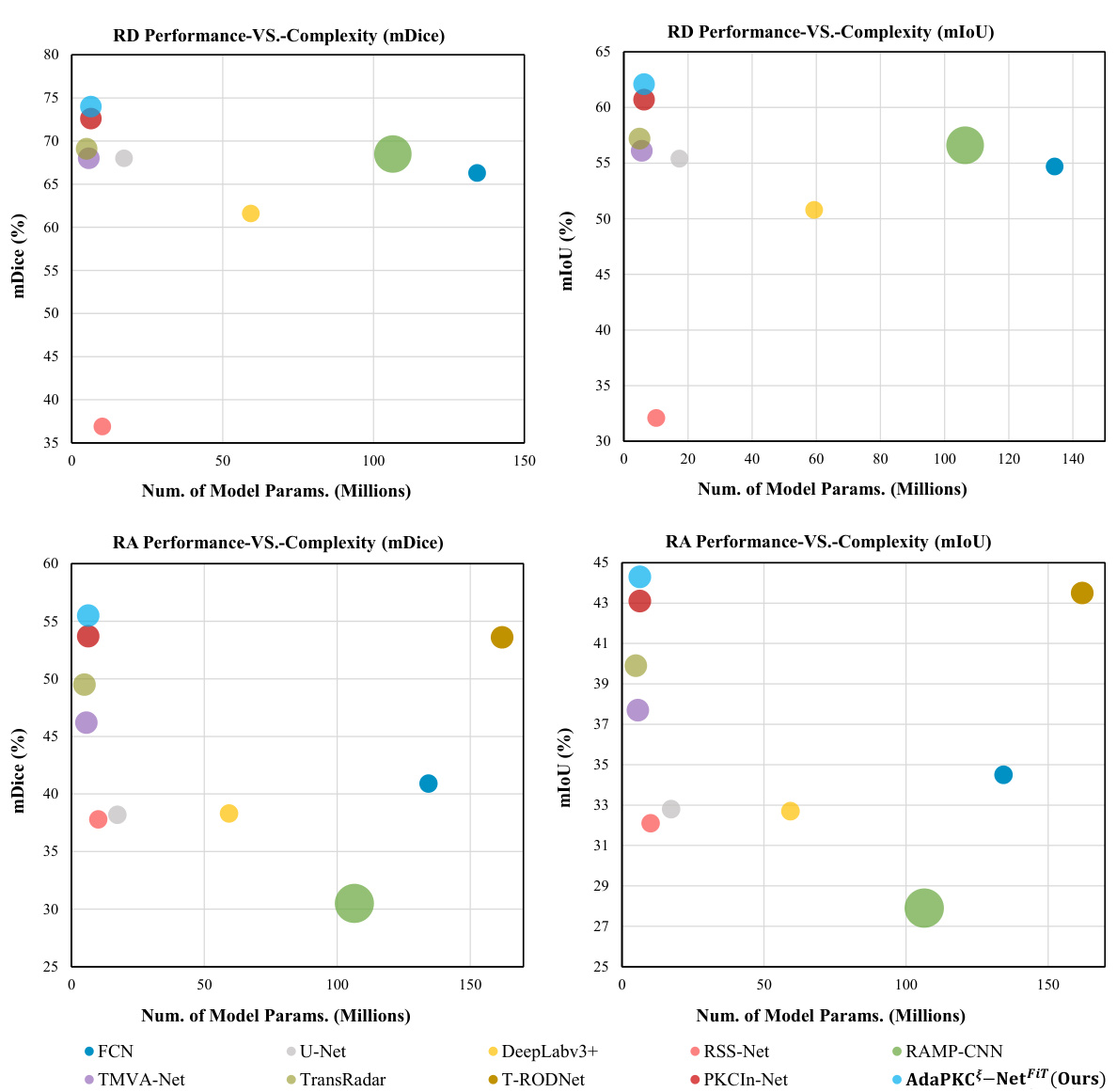
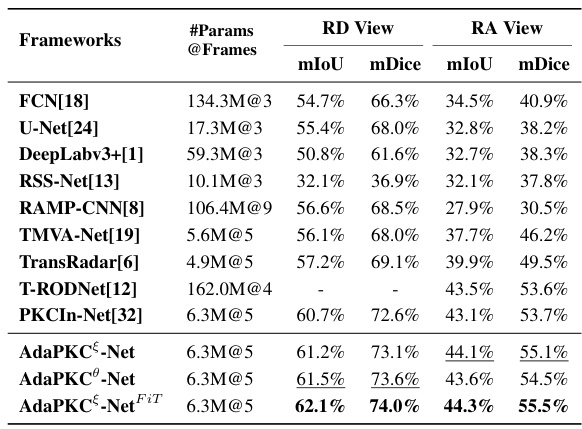
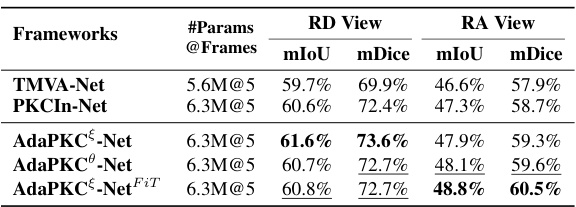
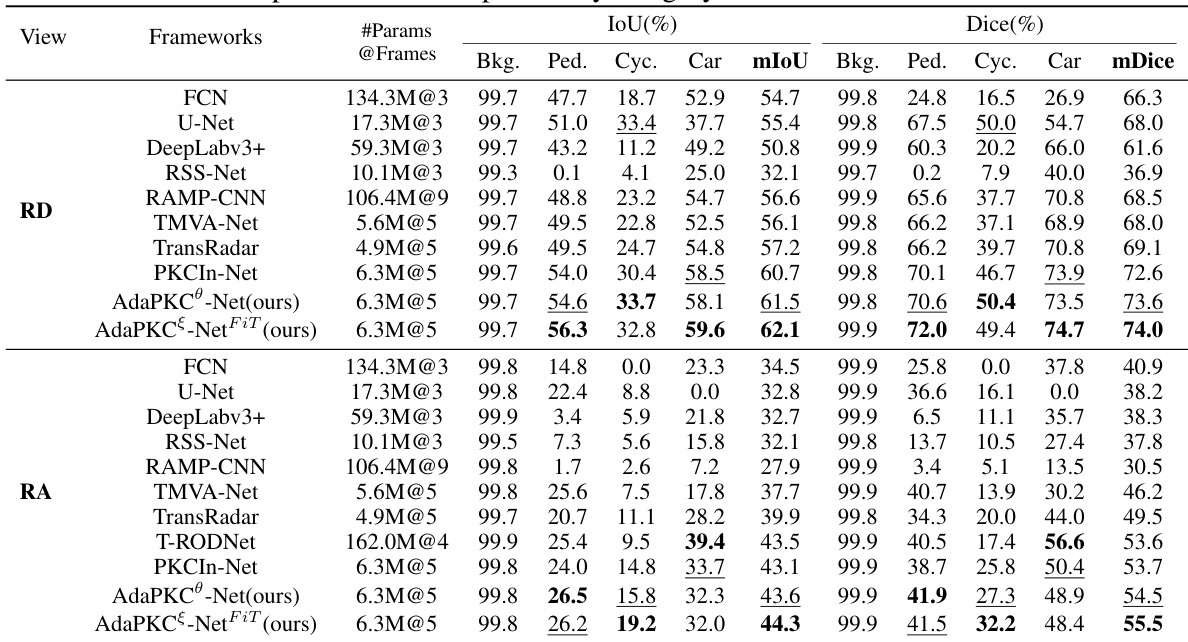
The research paper’s evaluation of RSS (Radar Semantic Segmentation) performance is multifaceted. Multiple datasets are used, showcasing robustness across various scenarios and radar types. The use of both quantitative metrics (mIoU, mDice) and qualitative visual comparisons provides a well-rounded assessment. State-of-the-art (SOTA) comparisons highlight the proposed method’s superior performance. Notably, the analysis extends beyond simple accuracy figures, examining the impact of various factors like view (RA, RD) and the effectiveness of additional techniques like the fine-tuning strategy (FiTOS). This thorough approach suggests a strong level of confidence in the results and their practical applicability. Specific attention to both strengths and weaknesses, such as limitations with certain data types, enhances the credibility of the findings.
FiTOS Fine-tuning#
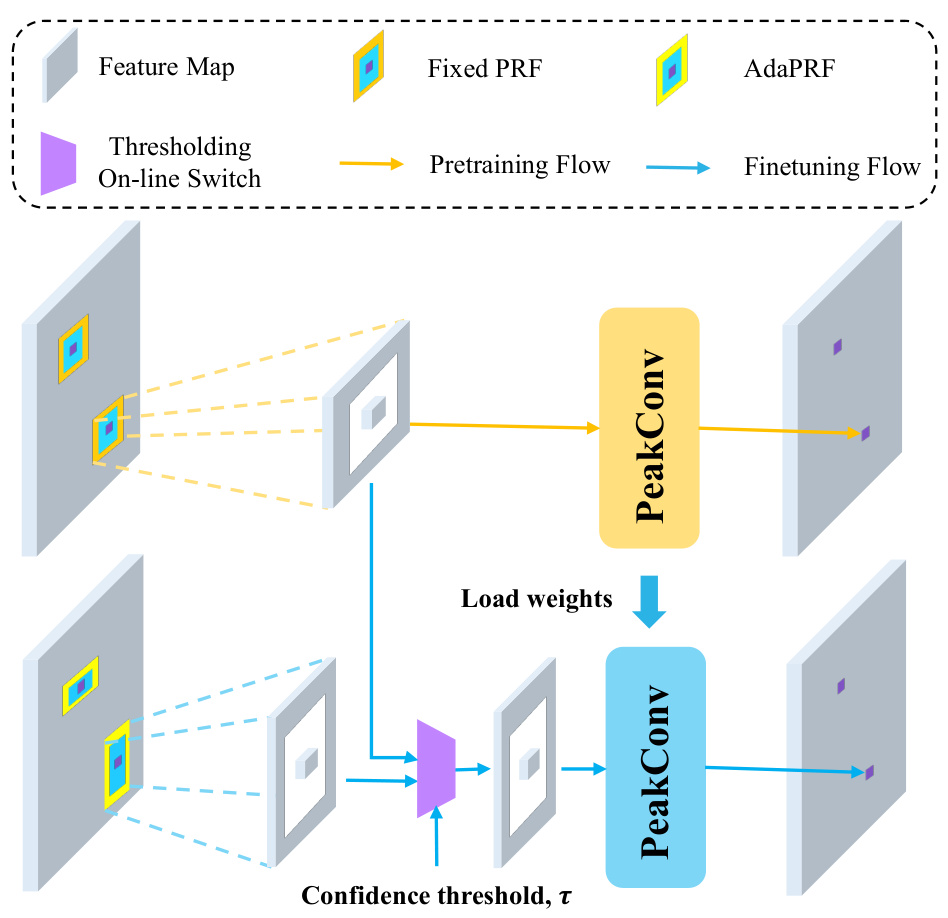
The heading ‘FiTOS Fine-tuning’ suggests a method for enhancing the performance of a model, likely a deep learning model for radar semantic segmentation, by incorporating a threshold-based on-line switch mechanism. FiTOS likely stands for a method name, possibly an acronym, which dynamically adjusts a key parameter (the peak receptive field) based on a confidence threshold. This adaptive approach tackles the challenges posed by fluctuating radar signals, improving model robustness and efficiency. The pre-training phase likely initializes the model using a simpler or existing technique (like a fixed receptive field approach), while the fine-tuning phase refines this pre-trained model with adaptive parameter adjustments only when the confidence level surpasses a pre-defined threshold. This strategic approach reduces computational cost and mitigates the risk of misinterpretations, particularly when dealing with unreliable data characteristics in the early stages of training. The effectiveness of FiTOS is likely validated experimentally, showing performance improvements surpassing other state-of-the-art models in radar semantic segmentation tasks.
Future Works#
The ‘Future Works’ section of a radar semantic segmentation research paper could explore several promising avenues. Extending AdaPKC to other radar modalities beyond the FMCW and Ku-band systems used in the study is crucial for broader applicability. This involves investigating its performance on different radar configurations and frequencies. Addressing the limitations of relying on real-world datasets is vital, especially the class imbalance problem and variations in signal quality. Generating synthetic radar data with controlled parameters could help mitigate dataset limitations and facilitate more rigorous testing and analysis. Improving the efficiency of AdaPKC is important for deploying it in resource-constrained applications like embedded systems; algorithmic optimizations and hardware acceleration could be explored. The research could delve deeper into the underlying principles, theoretically analyzing how AdaPKC’s adaptive PRF mechanism leverages the unique characteristics of radar signals for improved performance. Finally, investigating the potential of AdaPKC in different radar-related tasks beyond semantic segmentation, such as object detection and tracking, is a worthwhile pursuit.
More visual insights#
More on figures
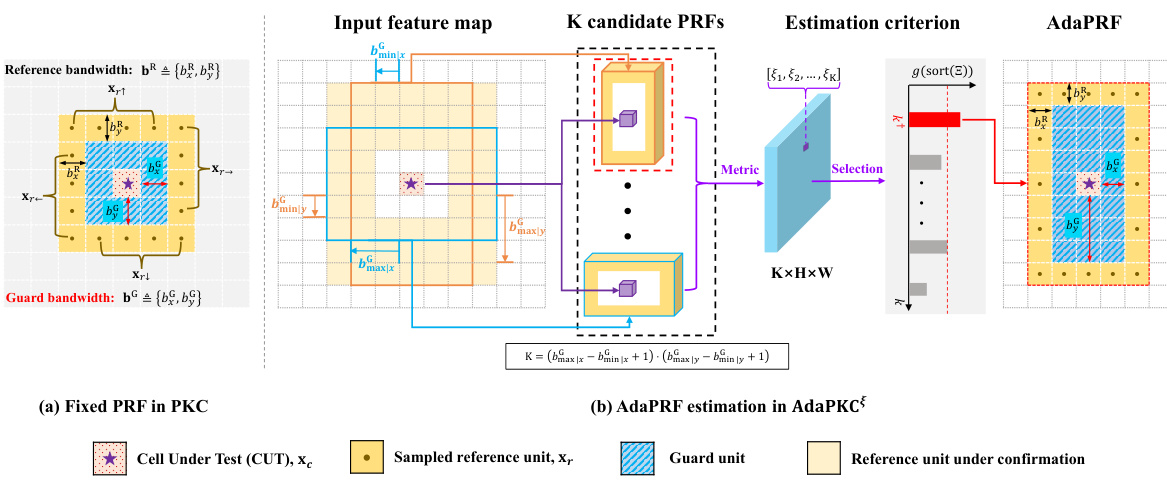
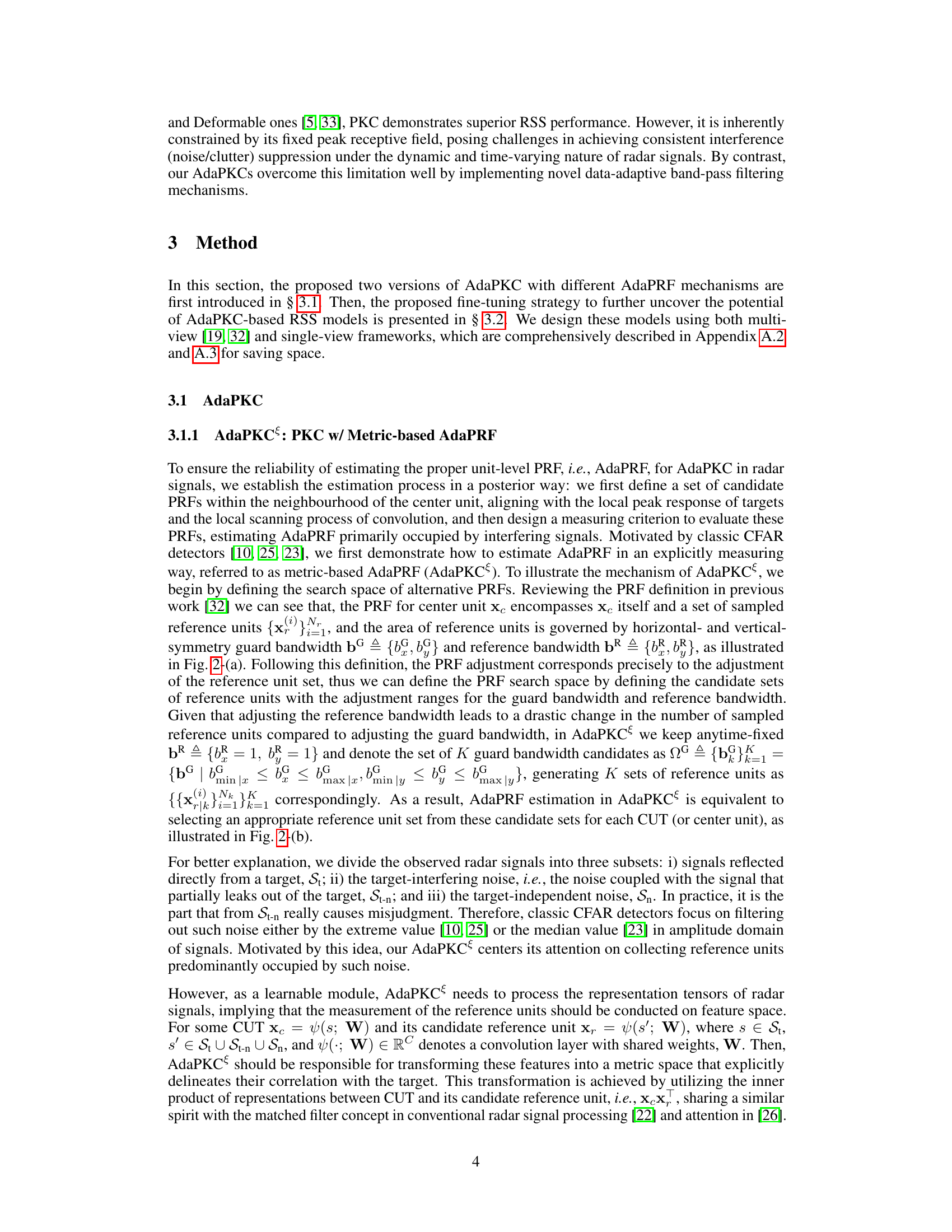
This figure shows the difference between the fixed Peak Receptive Field (PRF) used in the original PeakConv (PKC) and the adaptive PRF (AdaPRF) proposed in AdaPKC. (a) illustrates the fixed PRF in PKC, showing a pre-defined set of reference units used for noise estimation around the central unit (CUT). (b) illustrates the AdaPRF estimation process, where multiple candidate PRFs are generated around the CUT, each with a different guard bandwidth. An estimation criterion is applied to these candidates to select the optimal AdaPRF for that specific CUT, adapting to the dynamic characteristics of radar signals.
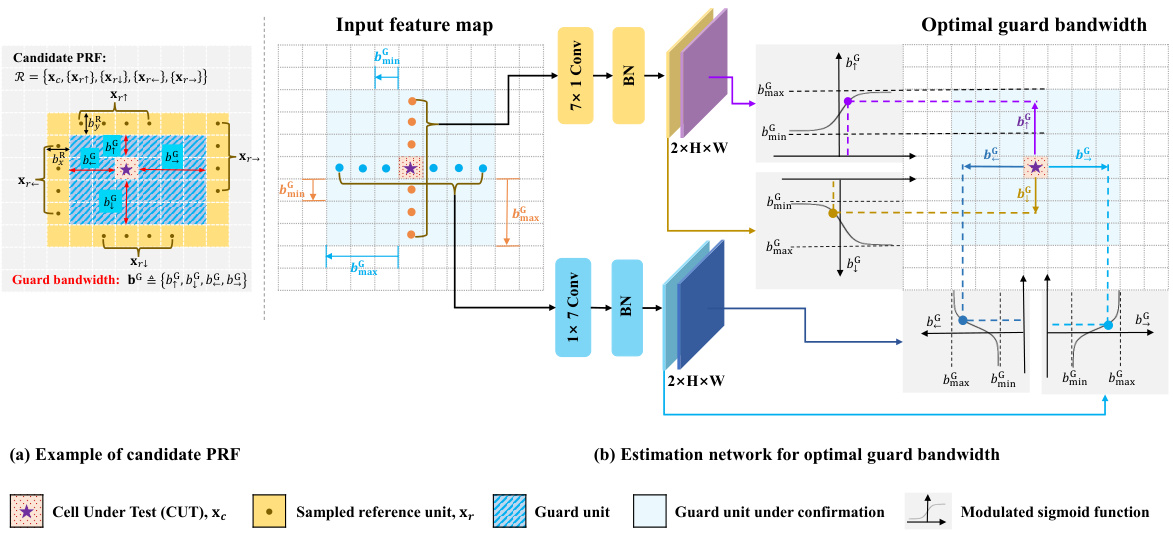
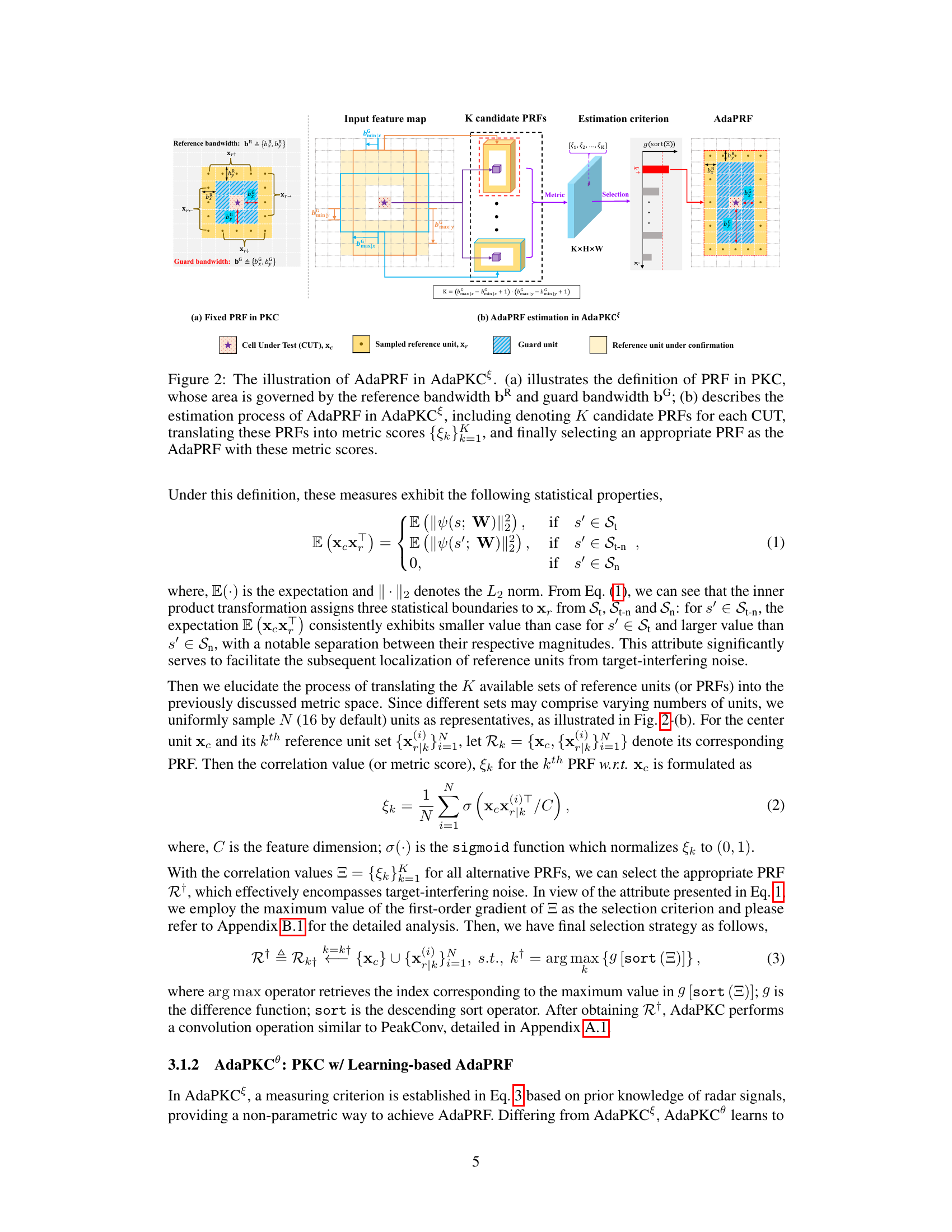
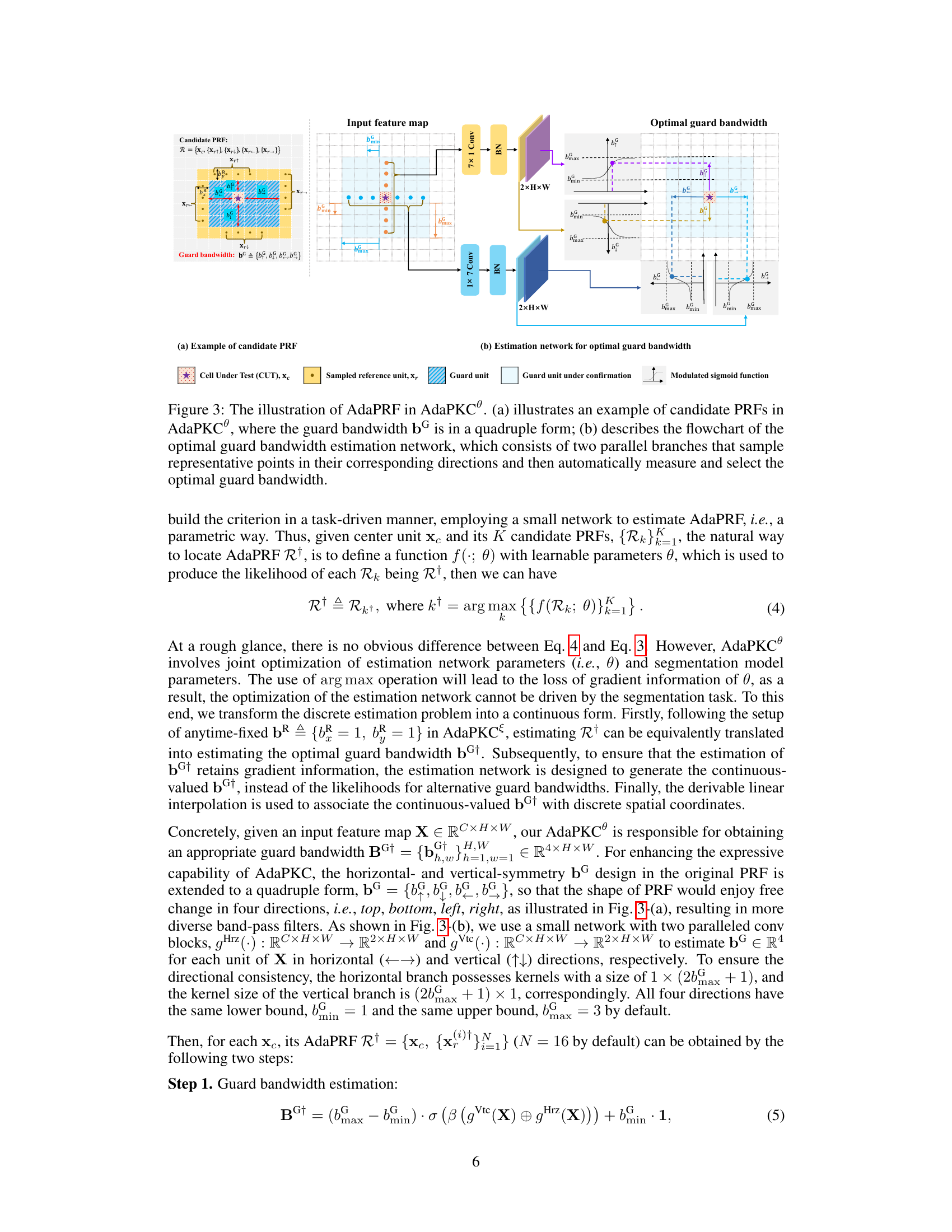
This figure illustrates the adaptive peak receptive field (AdaPRF) mechanism in AdaPKC°. Panel (a) shows an example of candidate PRFs with a quadruple guard bandwidth. Panel (b) details the network architecture used to estimate the optimal guard bandwidth, involving two parallel convolutional branches processing horizontal and vertical directions to estimate the optimal guard bandwidth for each cell.
This figure illustrates how the adaptive peak receptive field (AdaPRF) is estimated in the proposed AdaPKC method. Panel (a) shows the fixed peak receptive field (PRF) used in the original PeakConv (PKC) method, where the size is determined by the reference bandwidth (bR) and the guard bandwidth (bG). Panel (b) details the AdaPKC’s AdaPRF estimation process. It starts by defining K candidate PRFs within a search space around each cell under test (CUT). Each candidate PRF is translated into a metric score using a correlation measure. Finally, the AdaPRF is selected based on these metric scores. This adaptive selection allows AdaPKC to better handle the varying characteristics of radar signals.
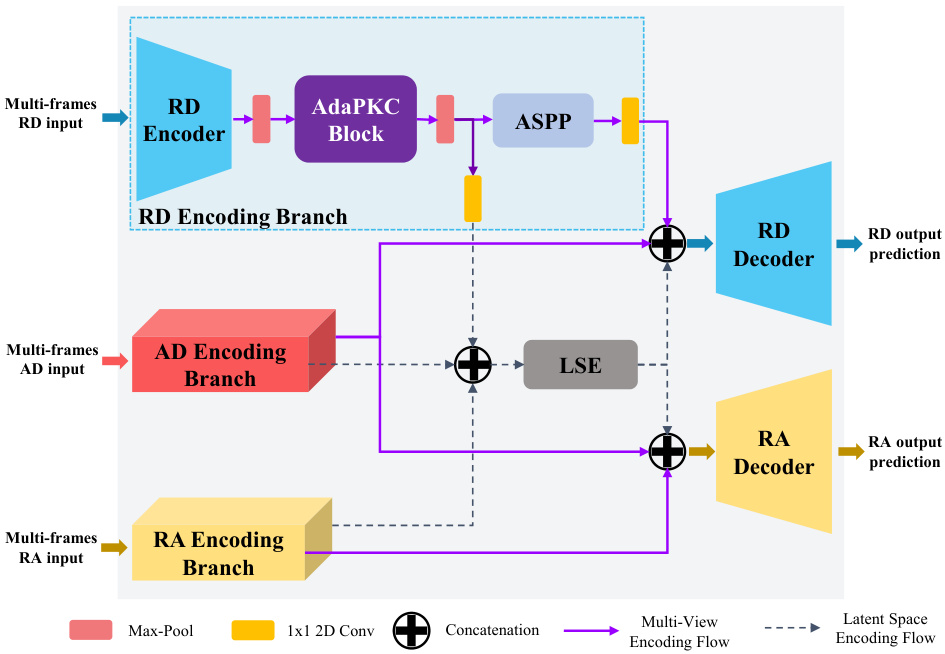
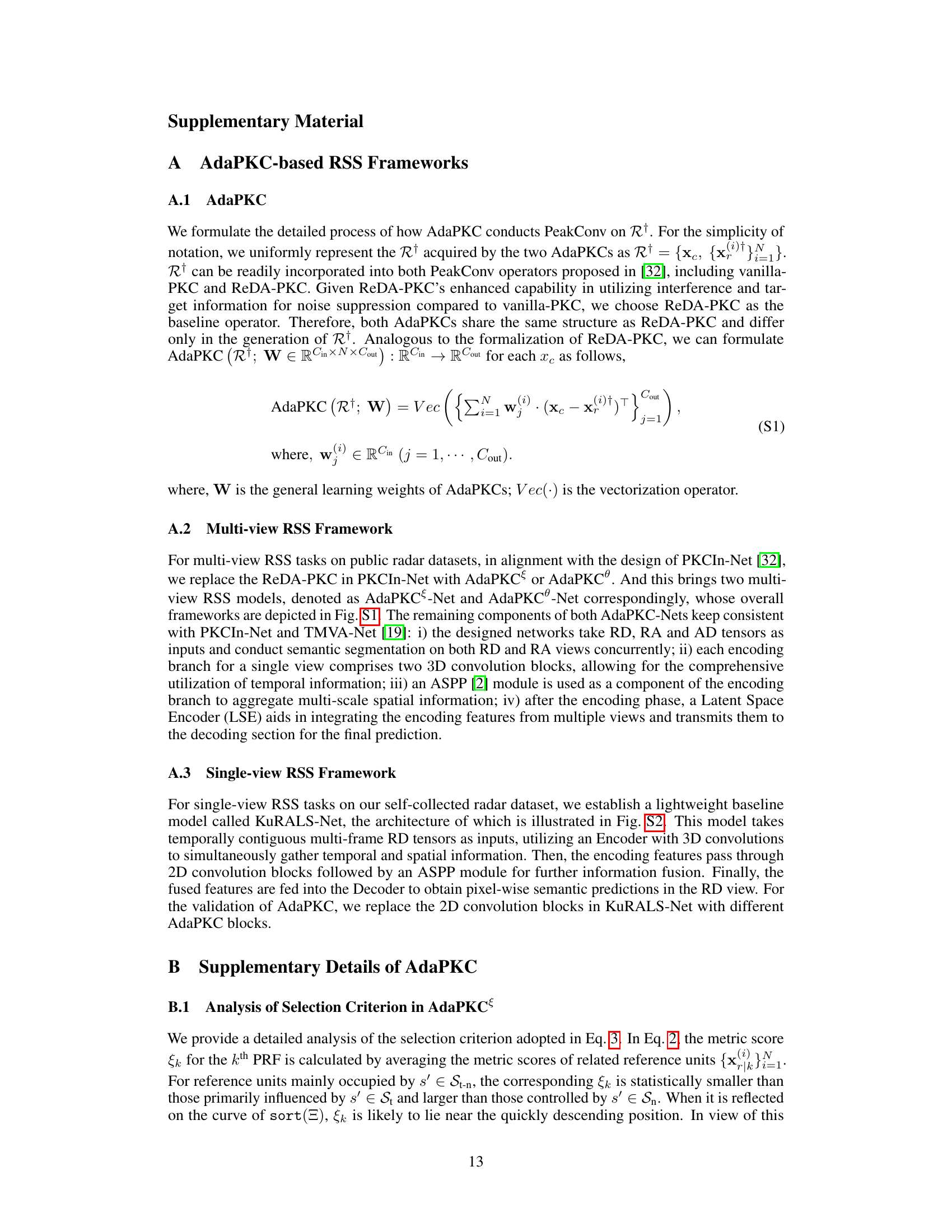
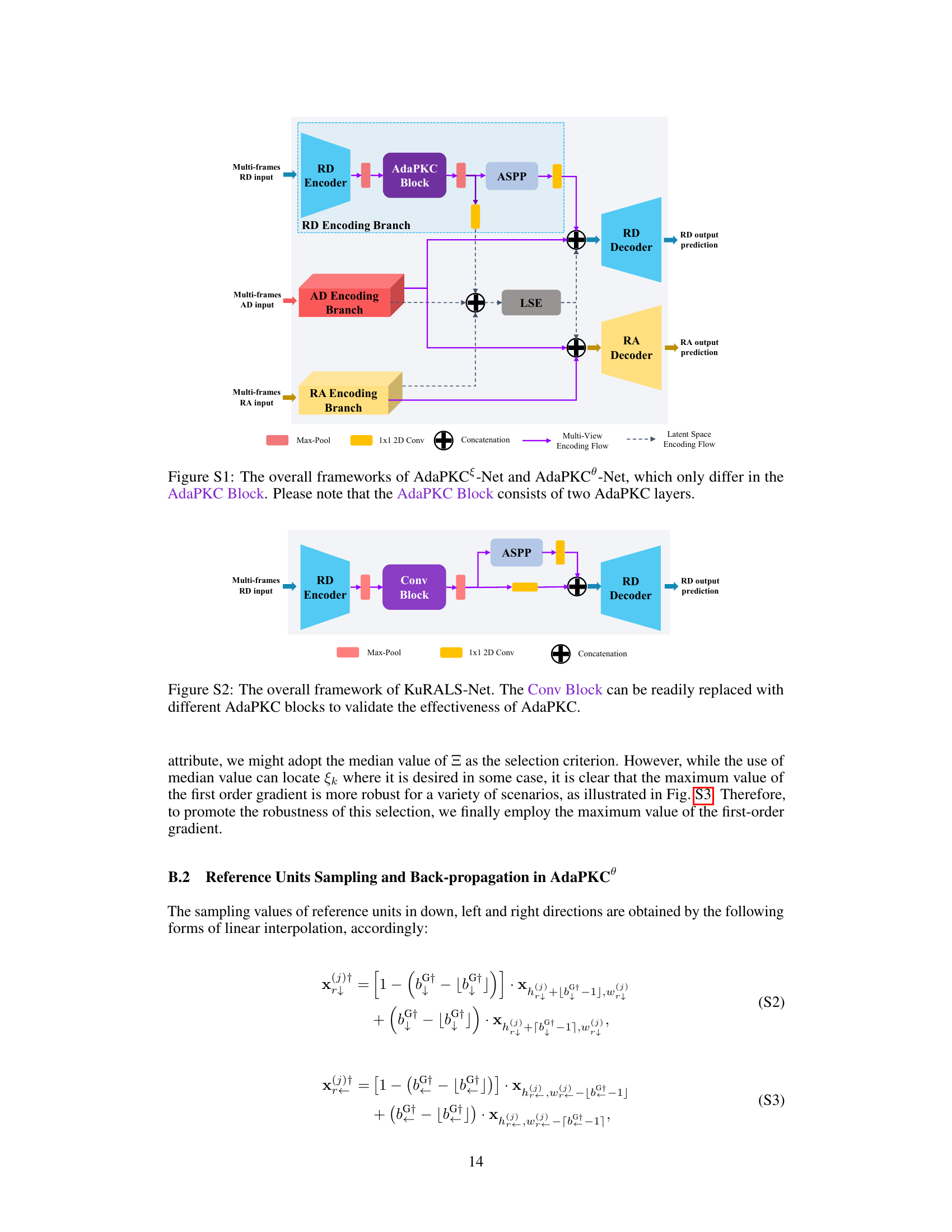
This figure shows the architecture of the AdaPKC-Net and AdaPKC⁰-Net models for multi-view radar semantic segmentation. Both models utilize three encoding branches (RD, AD, and RA) to process multi-frame radar data from different perspectives. The key difference between the two models lies in the AdaPKC block, which incorporates the proposed adaptive peak receptive field convolution. The figure details the flow of data through each branch, including max-pooling, 1x1 2D convolutions, and concatenation steps. A latent space encoder (LSE) integrates the features from the three branches, and subsequently, RD and RA decoders generate the final segmentation outputs for range-Doppler (RD) and range-azimuth (RA) views respectively. The AdaPKC block is highlighted, emphasizing its core role in the overall architecture.
This figure shows the difference between the fixed Peak Receptive Field (PRF) in the original PeakConv (PKC) and the adaptive PRF (AdaPRF) in the proposed AdaPKC. (a) illustrates the fixed PRF of PKC, which uses a pre-defined area for reference units determined by reference bandwidth and guard bandwidth. (b) illustrates how AdaPKC adapts the PRF, showing the process of selecting an optimal PRF (AdaPRF) from K candidate PRFs for each Cell Under Test (CUT) using a metric score based on correlation.
This figure illustrates the adaptive peak receptive field (AdaPRF) mechanism in AdaPKC. Panel (a) shows the fixed Peak Receptive Field (PRF) used in the original PeakConv (PKC) method, highlighting its fixed reference and guard bandwidths. Panel (b) details the AdaPKC’s AdaPRF estimation, where multiple candidate PRFs are generated with varying guard bandwidths. These candidates are evaluated using a metric score, and the optimal PRF is selected based on these scores.
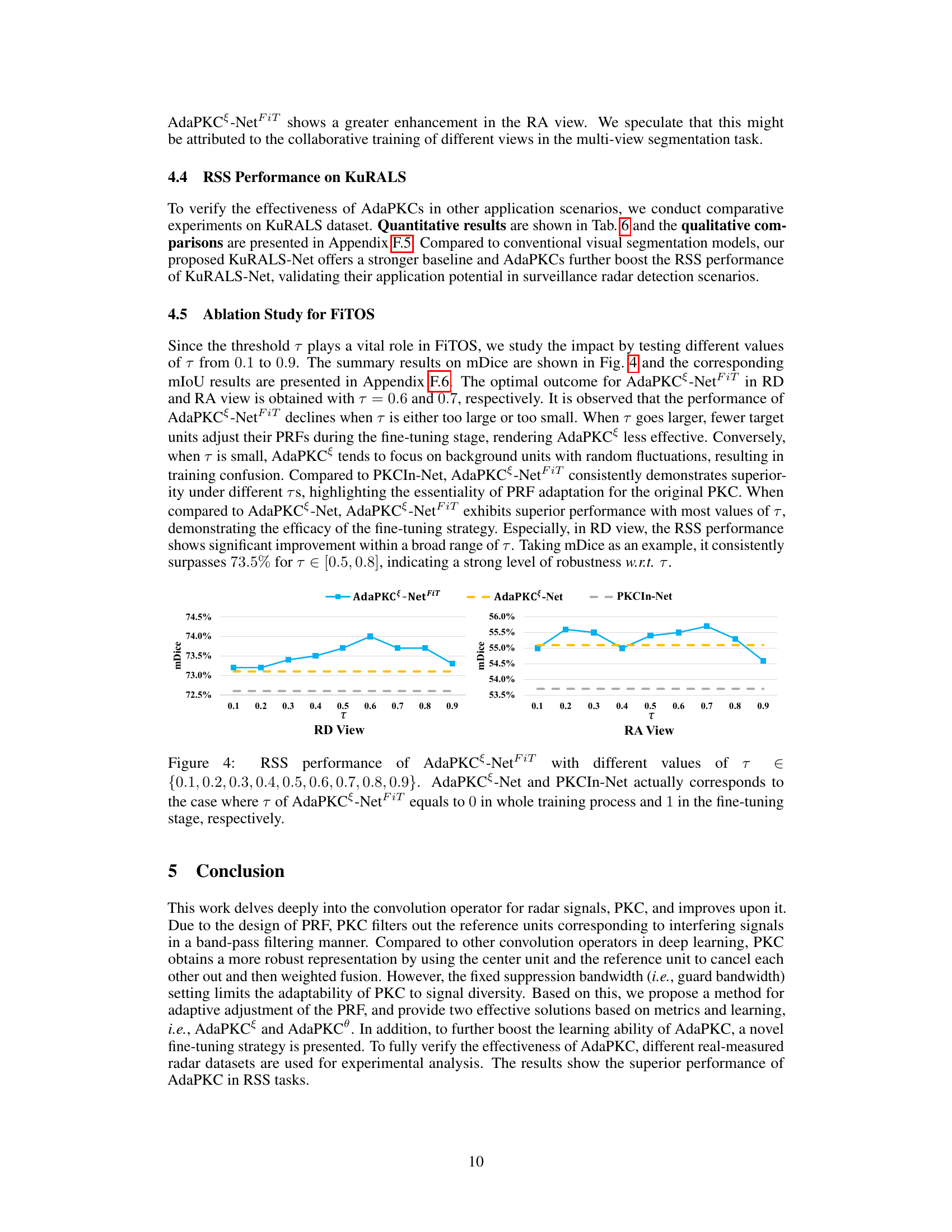
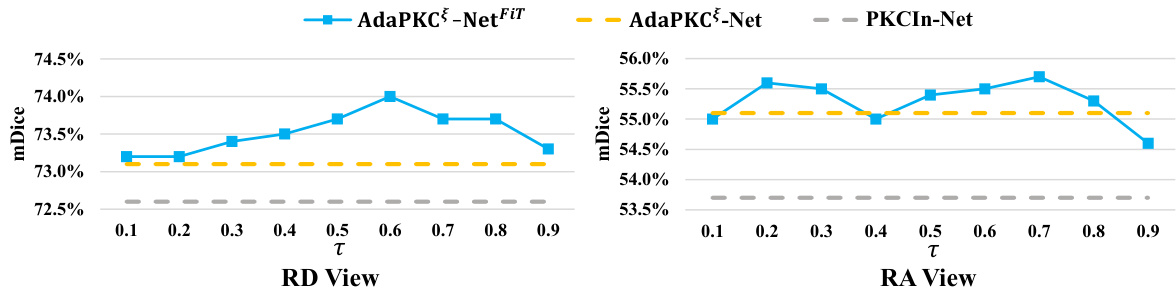
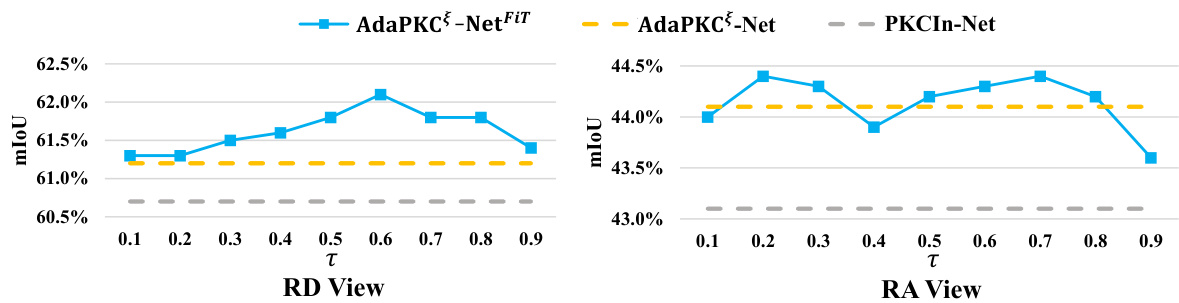
The figure shows the effect of different threshold values (τ) on the performance (mDice) of AdaPKC-NetFiT in both RD and RA views. The optimal threshold values (τ=0.6 for RD view and τ=0.7 for RA view) are highlighted. The results demonstrate that the proposed fine-tuning strategy significantly improves the performance of the model, exceeding that of AdaPKC-Net and PKCIn-Net, particularly in the RD view.
This figure illustrates the difference between the fixed PRF in PKC and the adaptive PRF (AdaPRF) in AdaPKC. In (a), the fixed PRF of PKC is shown, where its size is determined by the reference bandwidth and guard bandwidth. In (b), the AdaPKC process is illustrated. AdaPKC begins by defining a search space of possible PRFs, evaluates them using a metric based on the correlation between the center unit and its candidate reference units, and selects the best PRF (AdaPRF) based on the highest metric score.
This figure shows the difference between the fixed Peak Receptive Field (PRF) in the original PeakConv (PKC) and the adaptive PRF (AdaPRF) proposed in AdaPKC. The left side (a) illustrates the fixed PRF in PKC, where the area is defined by the reference bandwidth and guard bandwidth. The right side (b) shows the AdaPRF estimation process in AdaPKC, which involves defining candidate PRFs, converting them to metric scores, and selecting the best PRF based on these scores. This adaptive approach allows AdaPKC to better handle variations in target signatures and interference in radar signals.
This figure shows the Adaptive Peak Receptive Field (AdaPRF) mechanism of AdaPKC. (a) shows how PeakConv (PKC) defines its fixed Peak Receptive Field (PRF) using reference and guard bandwidths. (b) illustrates the AdaPKC’s adaptive PRF estimation: It first defines a search space of candidate PRFs around the central unit. Then, it translates these PRFs into metric scores using a correlation measurement, and finally, selects the AdaPRF that best accounts for the target-interfering noise.
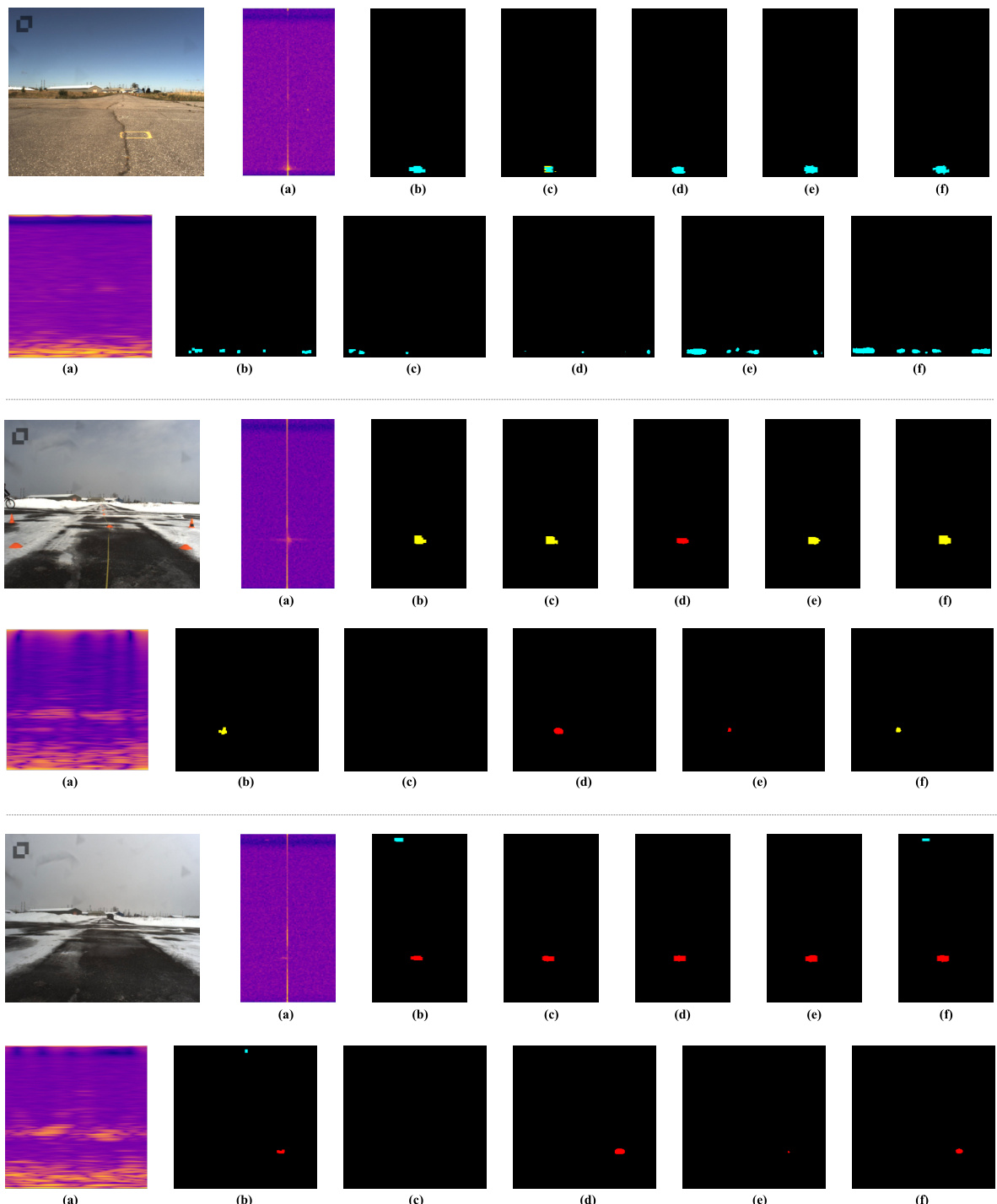
This figure shows how radar signals vary over time and between different objects. The top row shows how the same object’s signal changes across frames in a 3D range-Doppler representation. The bottom row shows how different objects appear in a 2D range-angle representation, along with how a single object changes across frames. The colors and shapes highlight target areas and different types of interference.
This figure shows how radar signals vary over time and between different objects. The top row displays a 3D representation of range, Doppler, and amplitude for a single object over multiple frames, illustrating how the target’s signature changes. The bottom row uses a 2D range-angle representation to compare different objects within the same frame and the same object across multiple frames, highlighting variations in the signal and the presence of interference (clutter). Different colors and shapes indicate targets, consistent clutter, and changing clutter.
This figure illustrates how the Adaptive Peak Receptive Field (AdaPRF) is estimated in the proposed AdaPKC method. Panel (a) shows the fixed Peak Receptive Field (PRF) used in the original PeakConv (PKC) method, highlighting its fixed size determined by the reference and guard bandwidths (bR and bG). Panel (b) demonstrates the AdaPKC’s adaptive approach. It starts by defining K candidate PRFs around the center unit (CUT). Each candidate PRF is then evaluated using a metric score (ξk) which represents the correlation with the target signal and interference. Finally, the AdaPKC selects the best-performing PRF based on these scores as the AdaPRF for that specific CUT.
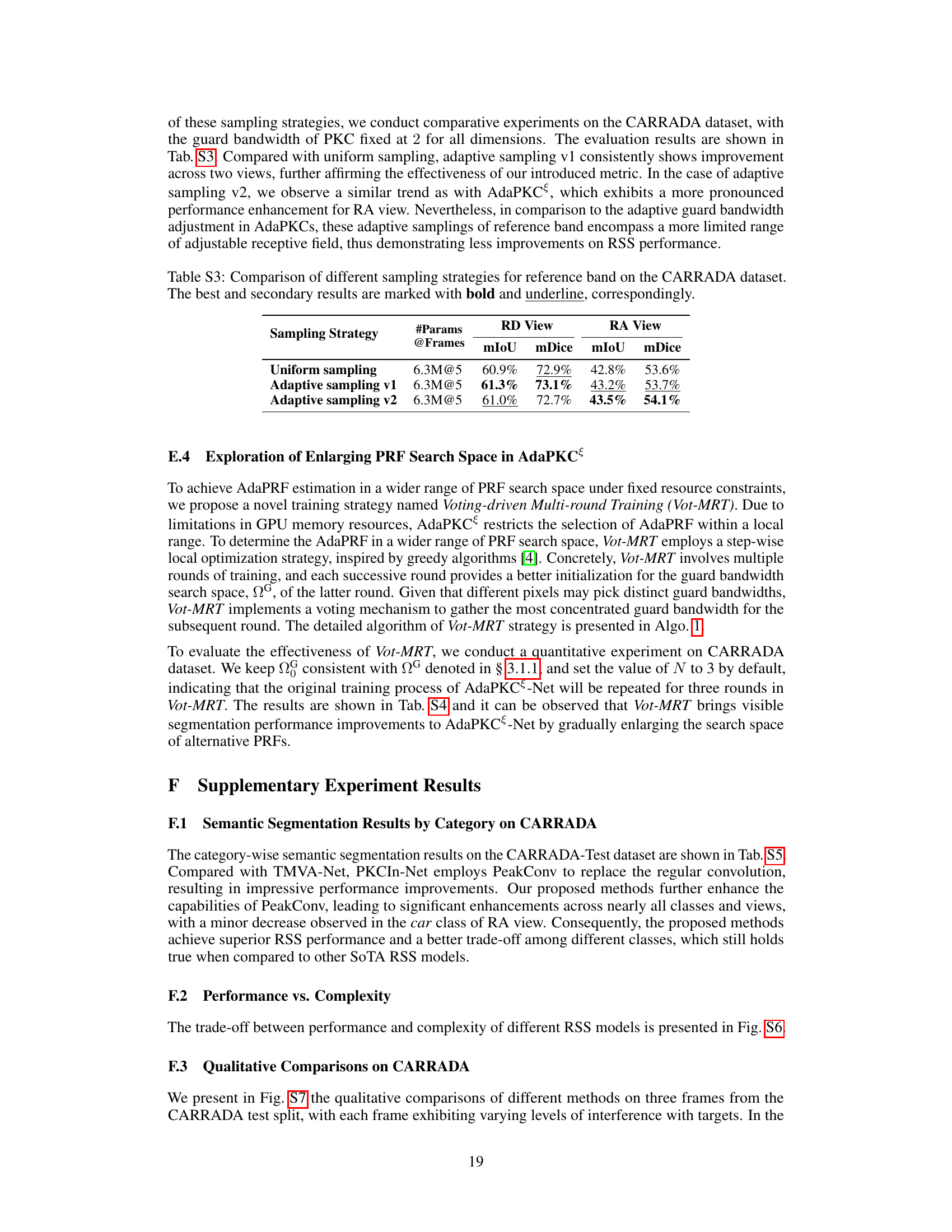
More on tables
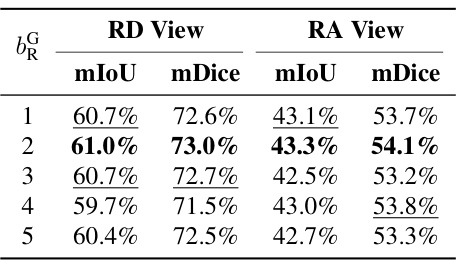
This table presents the results of an experiment evaluating the impact of manually adjusting the PeakConv (PKC) receptive field (PRF) on radar semantic segmentation performance. Different guard bandwidth values in the range dimension (bG) were tested while keeping the angle and Doppler guard bandwidths fixed at 1. The results demonstrate that manually adjusting the PRF can improve the performance compared to a fixed PRF but is less effective than the proposed adaptive method, AdaPKC.
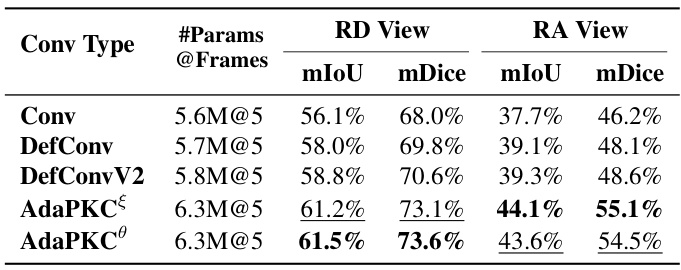
This table compares the performance of AdaPKC and AdaPKCθ against the original PeakConv model. It shows that both AdaPKC versions significantly improve upon PeakConv, particularly in the RA view, while maintaining comparable computational costs and inference speed. The results highlight AdaPKC’s effectiveness in handling situations with ambiguous frequency responses.
This table compares the performance of AdaPKC and AdaPKC⁰ with PeakConv, showing the model parameters, frames per second, and mean IoU and Dice scores for both RD and RA views. The superior performance of AdaPKC and AdaPKC⁰, particularly in the RA view, is highlighted.
This table compares the performance of AdaPKC and AdaPKC0 with PeakConv in terms of mIoU, mDice, GMACs, and FPS on the CARRADA dataset. It highlights the improved performance of AdaPKC models, especially in the RA view, with minimal increase in computational cost and speed.
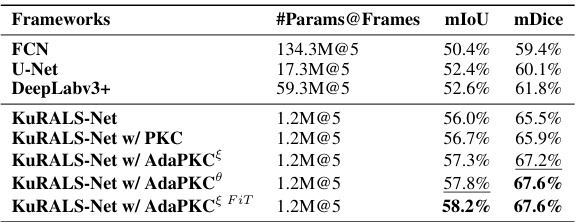
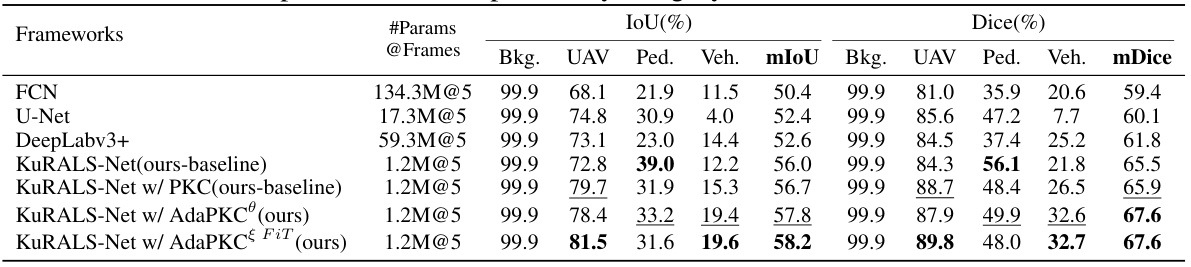
This table compares the performance of different models on the KuRALS dataset for radar semantic segmentation. It shows the model parameters, frames used, mean Intersection over Union (mIoU), and mean Dice score (mDice) for various models, including baselines and models using AdaPKC. The results demonstrate the improved performance of AdaPKC-based models in this specific application scenario.
This table compares the performance of AdaPKC and AdaPKCo with PeakConv on a workstation with an Intel(R) Xeon(R) Platinum 8255C CPU and a Tesla V100-SXM2 GPU. The best and second-best results for mIoU and mDice are highlighted for both RD and RA views. The number of parameters, frame rate, and GMACs are also provided for each model.

This table compares the performance of AdaPKC and AdaPKCo against the baseline PeakConv model. It shows that both AdaPKC versions significantly improve upon PeakConv in terms of mIoU and mDice, especially in the RA view. The table also provides the number of parameters, frames per second (FPS), and GMACS (giga-multiply-accumulate operations per second) for each model, giving a comprehensive performance comparison.
This table presents the results of an experiment evaluating the impact of manually adjusting the Peak Receptive Field (PRF) in the PeakConv (PKC) method on radar semantic segmentation performance. It shows the mean Intersection over Union (mIoU) and mean Dice coefficient (mDice) for the RD and RA views with different guard bandwidth settings in the range dimension. The results demonstrate that manually adjusting the PRF can improve performance, but highlights the challenge and limitations of this manual approach.
This table compares the performance of AdaPKC and PeakConv models in terms of mIoU, mDice, GMACs, and FPS for both RD and RA views. It highlights the improvement achieved by AdaPKC over PeakConv in terms of accuracy (mIoU and mDice) while maintaining a relatively similar computational cost (GMACS) and frames per second (FPS). The results showcase AdaPKC’s effectiveness in radar semantic segmentation.
This table compares the performance of AdaPKC and AdaPKCo with PeakConv on a workstation. It shows the number of parameters, frame rate (FPS), and mIoU/mDice scores for RD and RA views. The best and second-best results are highlighted.
This table compares the performance of AdaPKC and AdaPKCo with PeakConv on a workstation with an Intel(R) Xeon(R) Platinum 8255C CPU and a Tesla V100-SXM2 GPU. The results show the number of parameters, frames per second (FPS), mean IoU (mIoU), and mean Dice coefficient (mDice) for each method in both RD and RA views.
Full paper#