↗ OpenReview ↗ NeurIPS Homepage ↗ Chat
TL;DR#
Accurate point cloud registration is crucial for 3D computer vision, but existing methods struggle with noisy data and limited overlap. These often rely on coarse-to-fine matching, where unreliable coarse matching leads to errors, or struggle to eliminate outliers effectively at the coarse level. This affects the accuracy of the final alignment.
This paper introduces a novel method called Hierarchical Sinkhorn Tree (HST). HST uses a multi-scale approach to evaluate the consistency of each match across multiple feature scales, effectively filtering out outliers. This involves a clever use of a pruned tree structure and an overlap-aware Sinkhorn distance that focuses the matching process on likely overlapping regions. Experiments show that HST significantly outperforms existing methods, achieving higher accuracy and robustness in both indoor and outdoor environments.
Key Takeaways#
Why does it matter?#
This paper is crucial for researchers in 3D computer vision and point cloud processing. It directly tackles the challenge of robust registration in the presence of noise and low overlap, a persistent issue in many applications. The introduction of the Hierarchical Sinkhorn Tree (HST) and overlap-aware Sinkhorn distance provides a novel and effective solution, opening new avenues for improving accuracy and efficiency of 3D registration techniques. The experimental validation on multiple benchmarks demonstrates its superiority over existing methods. This work is directly relevant to current trends in learning-based methods for 3D registration, where reliable correspondences are critical. Further research could explore applications of HST in various fields like robotics, AR/VR, and autonomous driving.
Visual Insights#
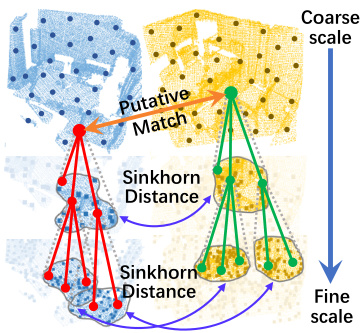
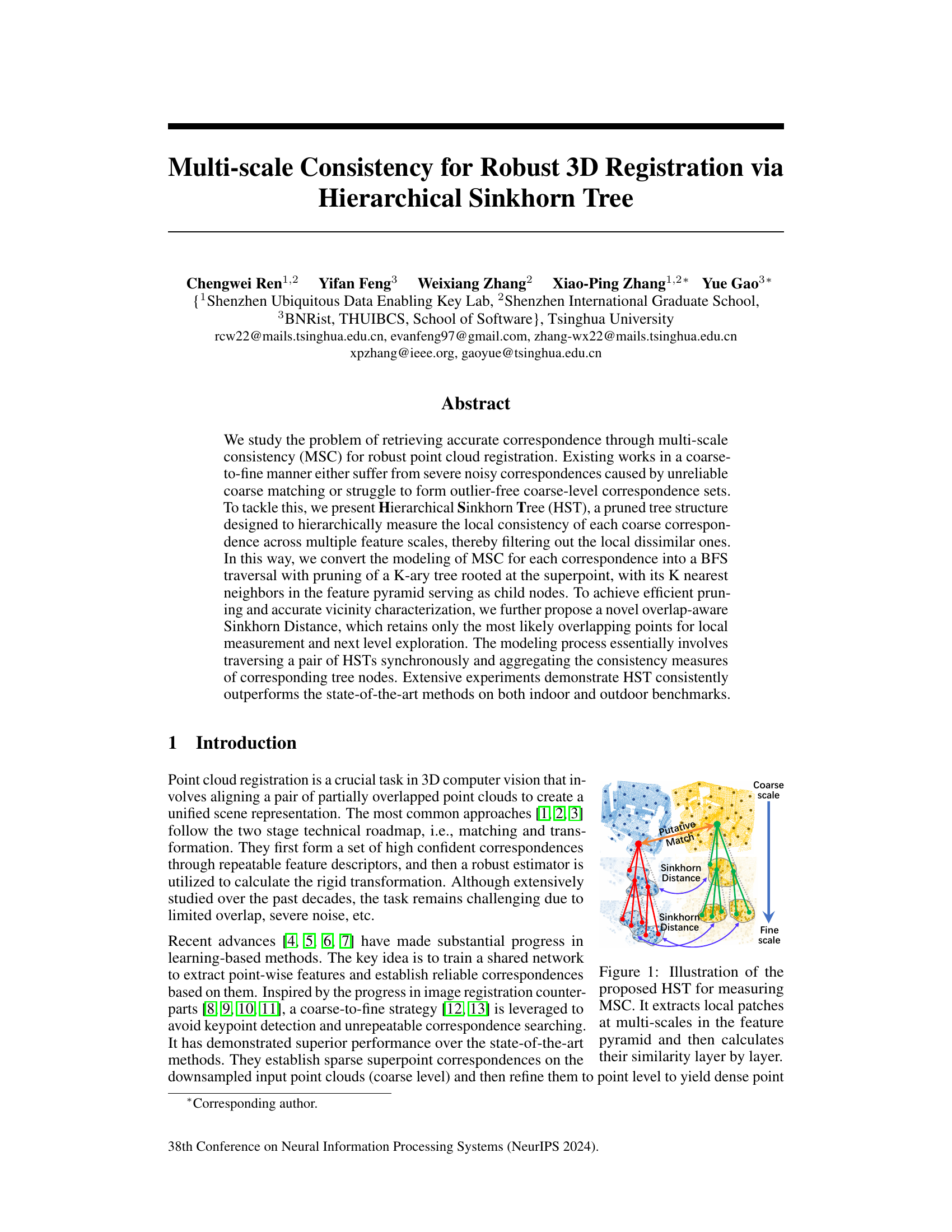
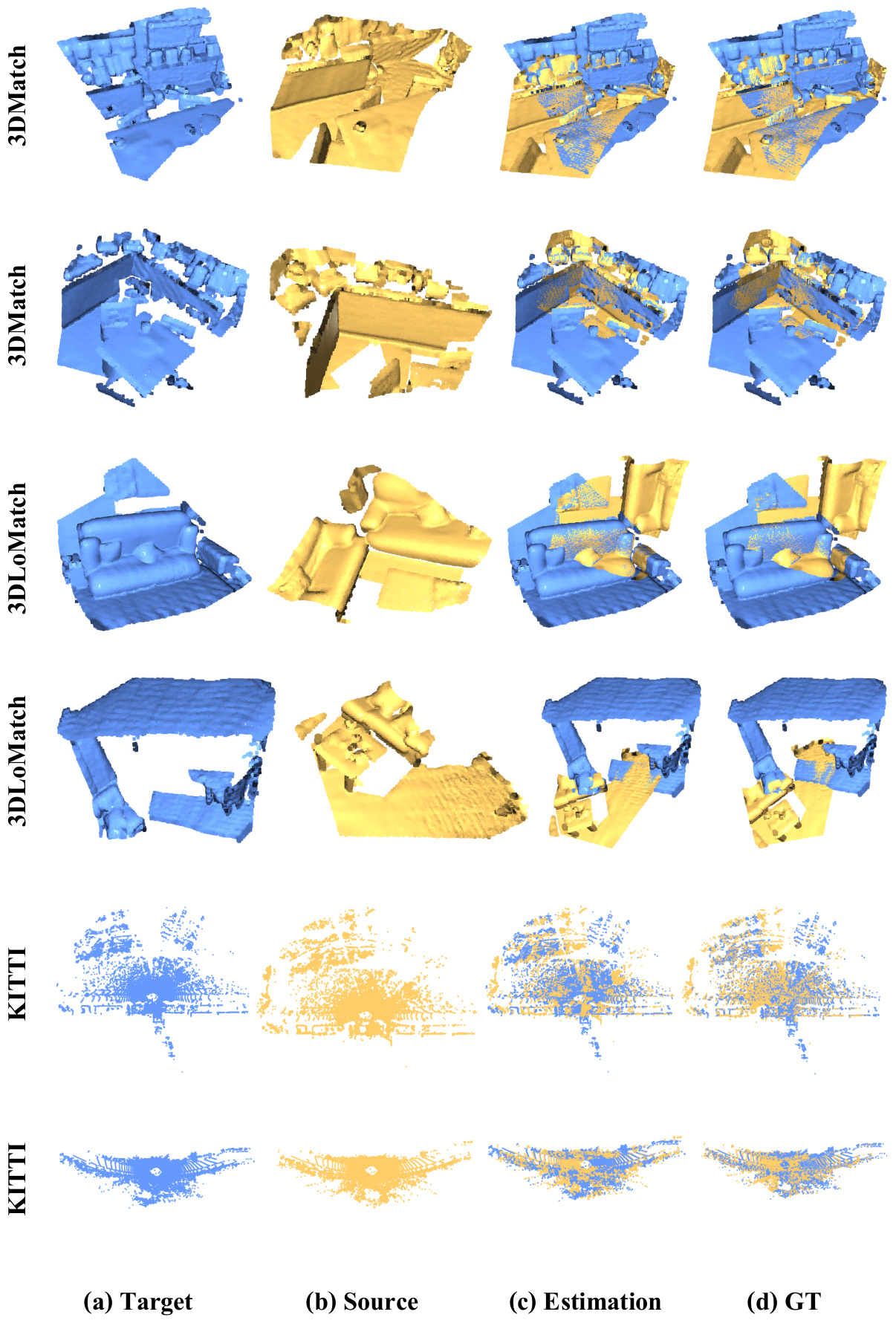
This figure illustrates the Hierarchical Sinkhorn Tree (HST) method for measuring multi-scale consistency (MSC) in 3D point cloud registration. The HST is a tree structure that hierarchically measures the local consistency of each coarse correspondence across multiple feature scales. The process begins by extracting local patches at multiple scales from a feature pyramid. Then, the similarity between these patches is calculated layer by layer using a novel overlap-aware Sinkhorn distance. This distance measure focuses on the most likely overlapping points, improving robustness to noise. By aggregating consistency measures across all scales, the HST filters out locally dissimilar correspondences, leading to more accurate and robust registration.
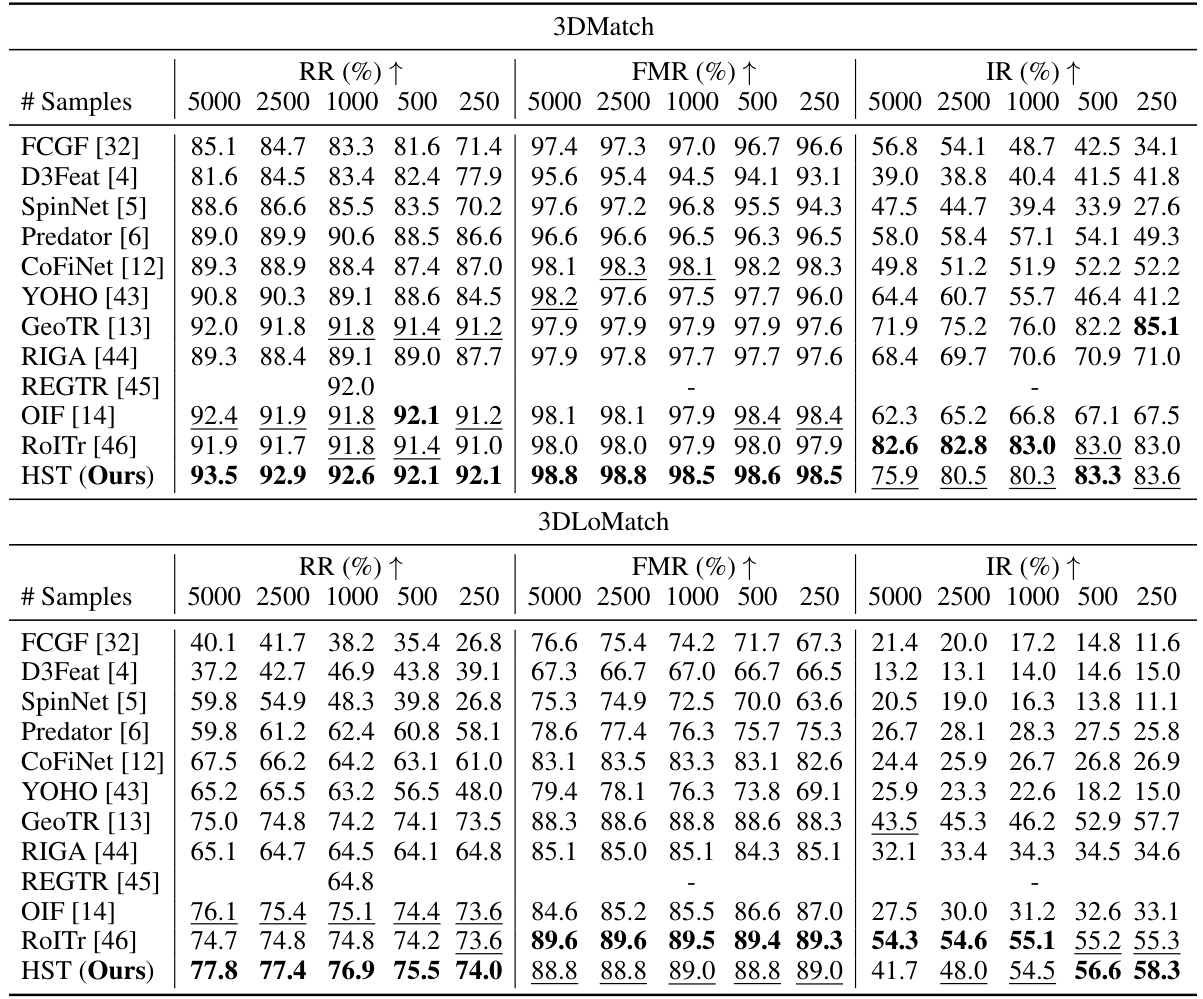
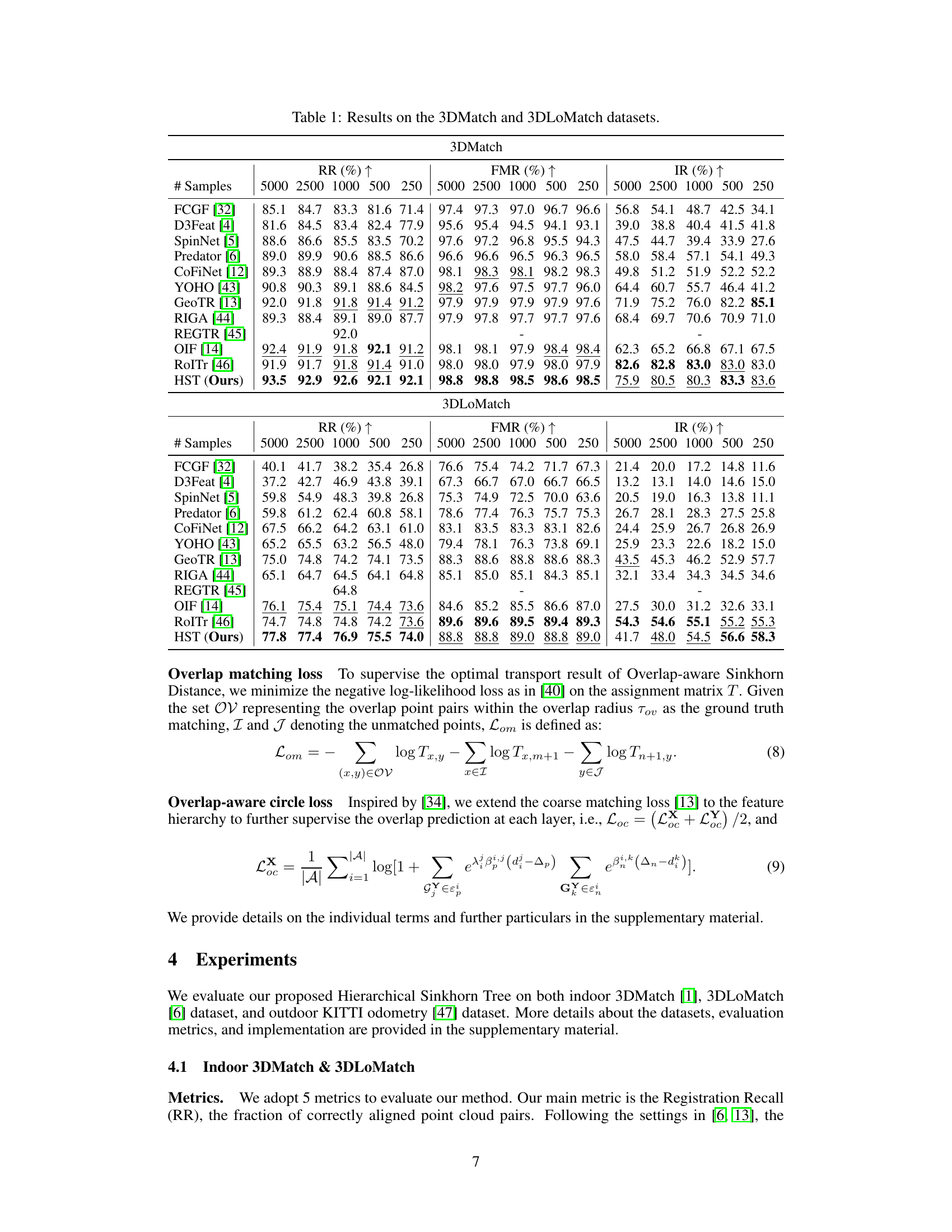
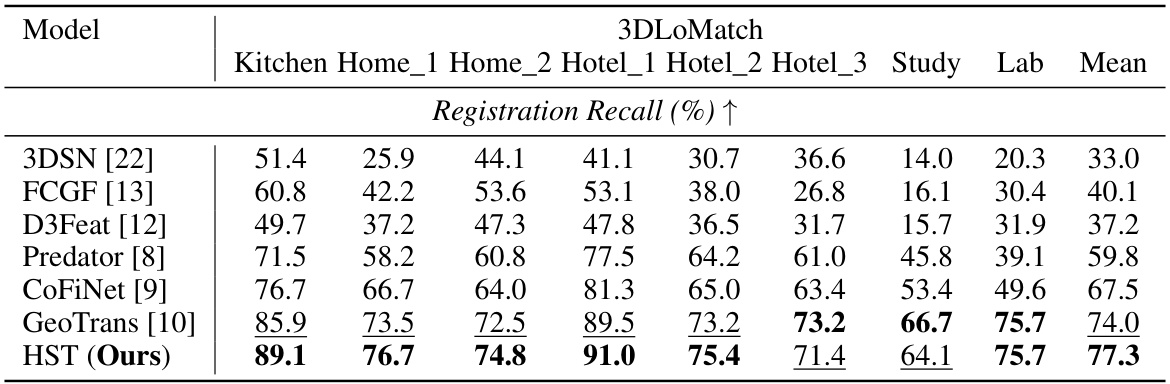
This table presents the quantitative results of the proposed Hierarchical Sinkhorn Tree (HST) method and compares it with other state-of-the-art methods on two benchmark datasets: 3DMatch and 3DLoMatch. For each dataset, the results are shown for different numbers of samples (5000, 2500, 1000, 500, 250) and three metrics are reported: Registration Recall (RR), Feature Matching Recall (FMR), and Inlier Ratio (IR). Higher values for RR and IR are better, while lower values for FMR are better. The table allows for a comparison of the performance of HST against existing methods under varying data conditions.
In-depth insights#
Multi-Scale Consistency#
Multi-scale consistency, in the context of 3D point cloud registration, addresses the challenge of establishing reliable correspondences between points in overlapping scans acquired at different scales. The core idea is that accurate correspondences should exhibit consistent geometric relationships across multiple resolutions. A coarse-to-fine strategy is often employed, starting with low-resolution features to establish initial, sparse correspondences, then refining them at higher resolutions. The robustness of this approach relies heavily on effectively managing noise and outliers that are more likely to appear in coarser levels. By incorporating multi-scale information, the method gains resilience against noise and inaccuracies inherent in individual feature scales. This consistency check across scales helps to filter out false positives and improve overall registration accuracy. Techniques for measuring multi-scale consistency often involve comparing local feature descriptors or geometric relationships at different resolutions and integrating those comparisons to arrive at a more robust match assessment. The effectiveness of multi-scale consistency hinges on the careful design of the feature extraction and matching processes, ensuring that informative and repeatable features are consistently identified at all scales.
Hierarchical Sinkhorn Tree#
The proposed Hierarchical Sinkhorn Tree (HST) method tackles robust 3D point cloud registration by efficiently addressing multi-scale consistency. HST leverages a tree structure to hierarchically evaluate local consistency across multiple feature scales, effectively filtering out noisy correspondences. This hierarchical approach, unlike traditional coarse-to-fine methods, avoids issues stemming from unreliable coarse matching or difficulty in forming outlier-free coarse-level sets. A key innovation is the overlap-aware Sinkhorn distance, which focuses computation on likely overlapping points, improving robustness and efficiency. The method’s effectiveness is demonstrated through extensive experiments, showcasing consistent outperformance of state-of-the-art techniques in both indoor and outdoor settings. The HST approach offers a novel and powerful way to model multi-scale consistency for robust and accurate 3D registration, particularly beneficial in challenging scenarios with low overlap or high noise.
Overlap-aware Sinkhorn#
The concept of “Overlap-aware Sinkhorn” suggests a modification to the standard Sinkhorn algorithm, a prominent method in optimal transport. This modification likely focuses on improving efficiency and accuracy by concentrating computational resources on the regions where two datasets significantly overlap. Instead of processing the entire datasets indiscriminately, it would prioritize areas with higher probability of matching points, thus reducing unnecessary calculations and potentially mitigating the impact of noisy or outlier data points that exist in non-overlapping areas. This approach is especially beneficial for scenarios such as point cloud registration, where datasets may contain significant amounts of noise or where overlaps are partial or small. The “overlap-aware” aspect likely involves a pre-processing or weighting scheme that identifies and emphasizes the overlapping regions before the Sinkhorn algorithm is applied. This could involve techniques like preliminary feature matching or a proximity measure to estimate the likely correspondences between the two datasets. The resulting optimization would be more robust and efficient, leading to better accuracy in the final alignment or matching results.
Robust 3D Registration#
Robust 3D registration is crucial for various applications needing accurate alignment of 3D point clouds. Challenges include noise, partial overlap, and outliers, necessitating robust methods. Approaches often involve feature extraction, correspondence establishment, and transformation estimation. Recent advancements leverage deep learning to learn robust features and improve matching accuracy. Multi-scale consistency offers a promising strategy to enhance robustness by verifying correspondences across different resolutions, filtering out unreliable matches and improving the accuracy of the final alignment. The development of novel distance metrics, such as overlap-aware Sinkhorn distance, further strengthens this approach by focusing computation on reliable regions, thus enhancing efficiency and accuracy. Future research may explore the integration of other modalities (e.g. color, semantics) to further enhance robustness and handle more challenging scenarios, improving the overall reliability and applicability of 3D registration techniques.
Future Research#
Future research directions stemming from this work could explore several promising avenues. Extending the Hierarchical Sinkhorn Tree (HST) framework to handle dynamic scenes would significantly enhance its applicability to real-world scenarios, particularly in robotics and autonomous navigation. This could involve incorporating temporal consistency constraints or leveraging online learning techniques to adapt to changing environments. Another area for improvement lies in the robustness to severe noise and outliers, particularly in low-overlap scenarios. Investigating more sophisticated outlier rejection strategies, perhaps informed by contextual information or semantic segmentation, could substantially improve performance under challenging conditions. Finally, exploring alternative distance metrics within the HST framework, beyond the current overlap-aware Sinkhorn distance, could unlock further potential improvements. This could entail evaluating the effectiveness of other optimal transport methods or exploring geometrically motivated distance functions specifically tailored to the characteristics of point cloud data. These enhancements would lead to a more versatile and robust 3D registration method applicable across a wider range of applications.
More visual insights#
More on figures

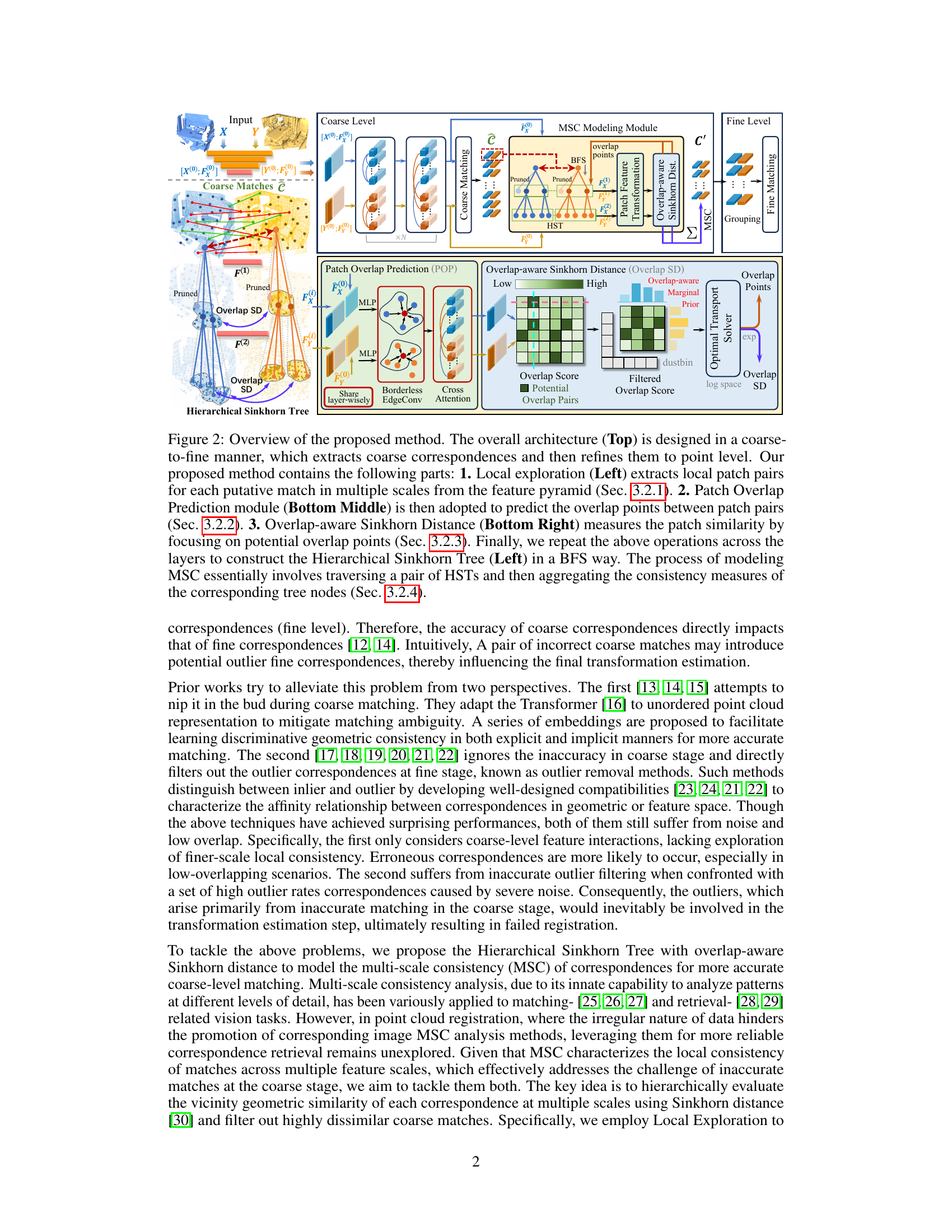
This figure provides a comprehensive overview of the proposed Hierarchical Sinkhorn Tree (HST) method for robust 3D point cloud registration. It illustrates the method’s coarse-to-fine approach, starting with coarse matching at multiple scales, and then refining it to the point level using local patch exploration, overlap prediction, overlap-aware Sinkhorn distance computation, and hierarchical tree traversal. The figure highlights the key modules, including local exploration, Patch Overlap Prediction, Overlap-aware Sinkhorn Distance, and HST, and illustrates their interaction and contribution to the final registration result.
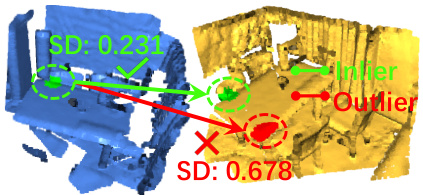
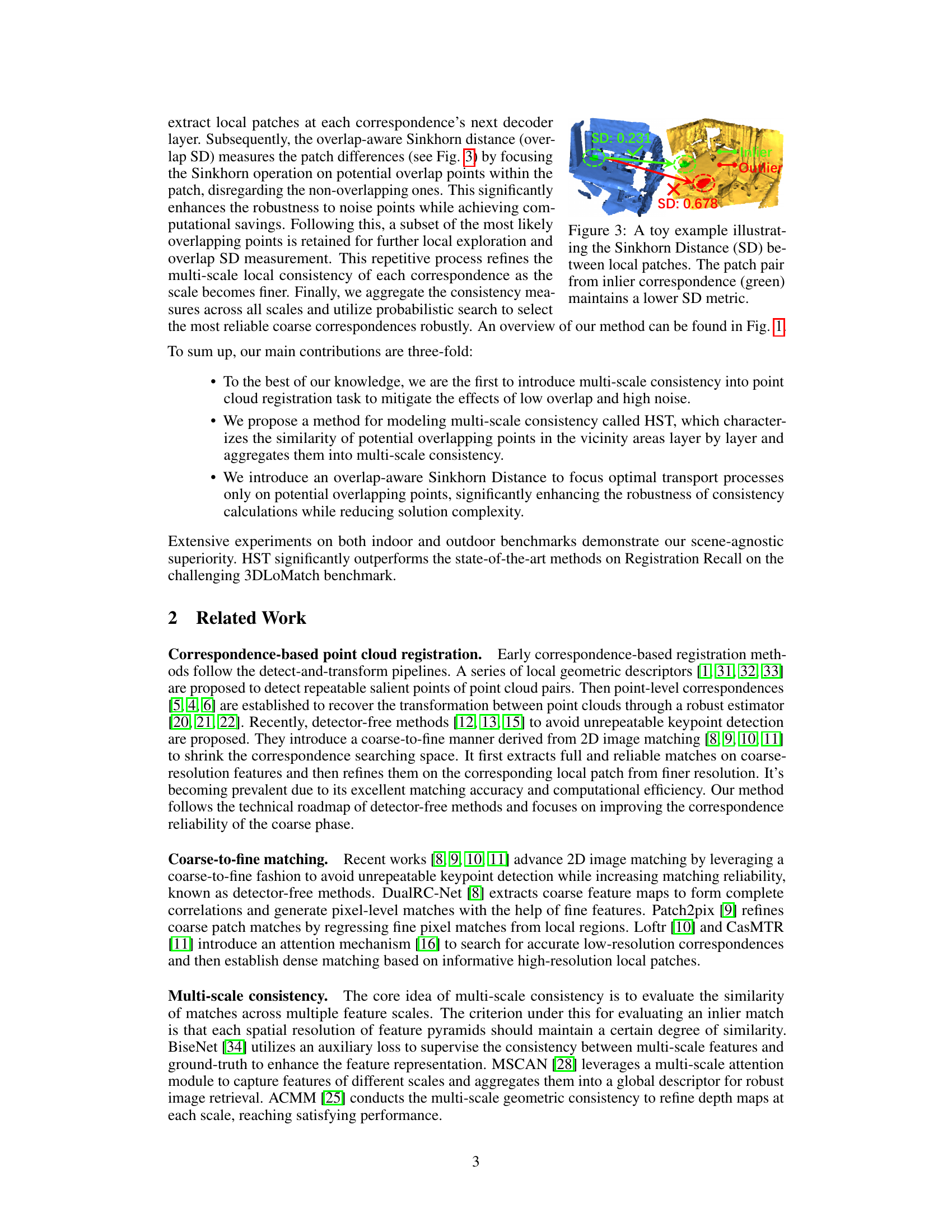
This figure is a toy example showing how the proposed overlap-aware Sinkhorn distance works. Two patches from different point clouds are compared. One patch pair (green) represents inlier correspondences and has a lower Sinkhorn distance (SD) of 0.231. The other patch pair (red) represents outlier correspondences and has a higher SD of 0.678. This illustrates that the overlap-aware Sinkhorn distance can effectively distinguish between inlier and outlier correspondences by focusing on the overlapping regions of the patches.
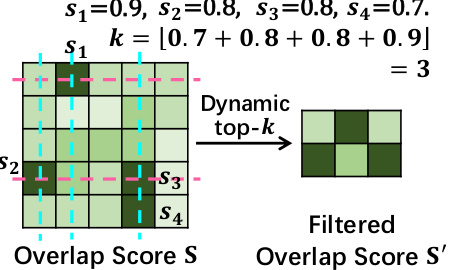
This figure illustrates the dynamic top-k strategy used for overlap points filtering. It shows how the number of overlapping points retained (k) is dynamically determined based on the sum of the top-q overlap scores. Points with scores above the threshold are kept, while those below are discarded. This adaptive approach improves robustness and reduces computational overhead.

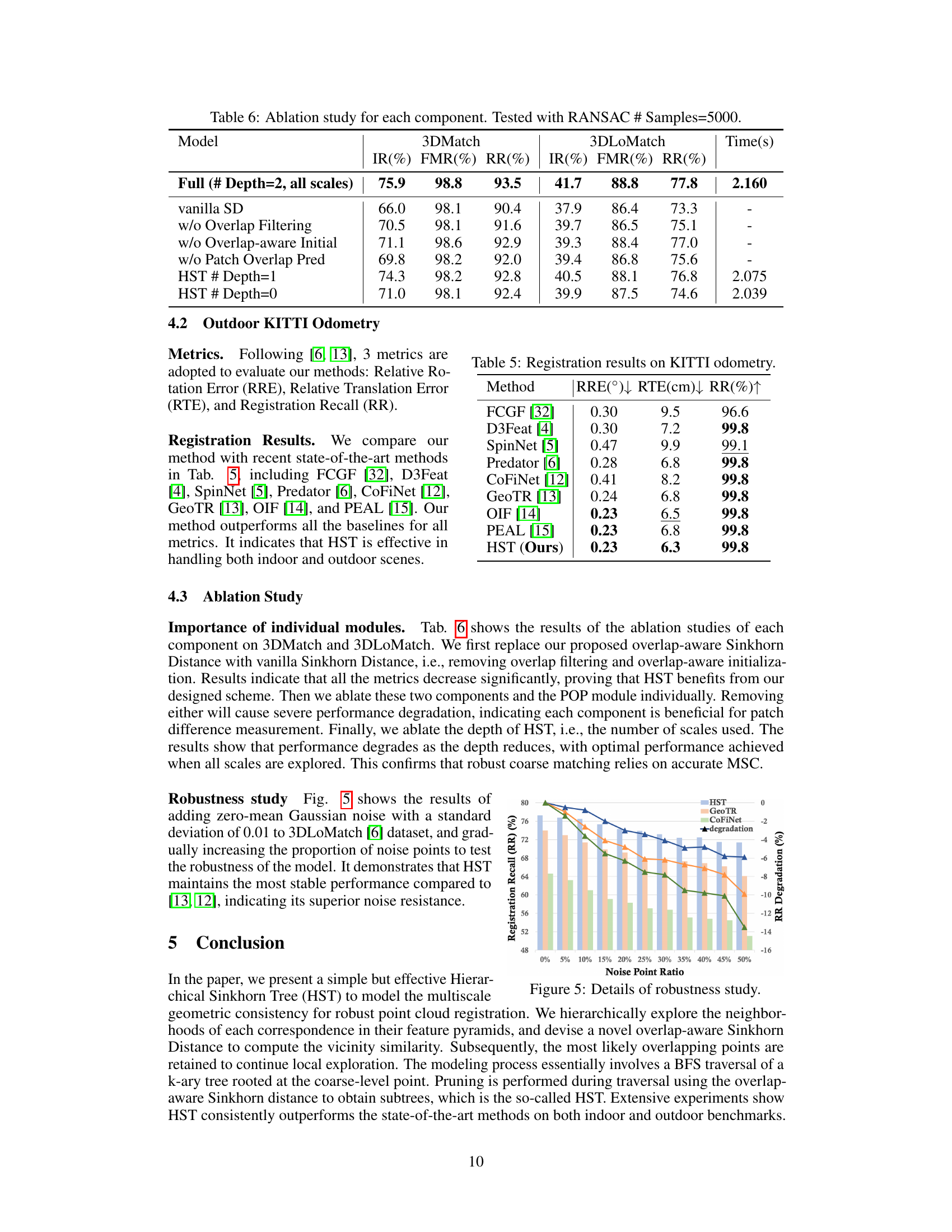
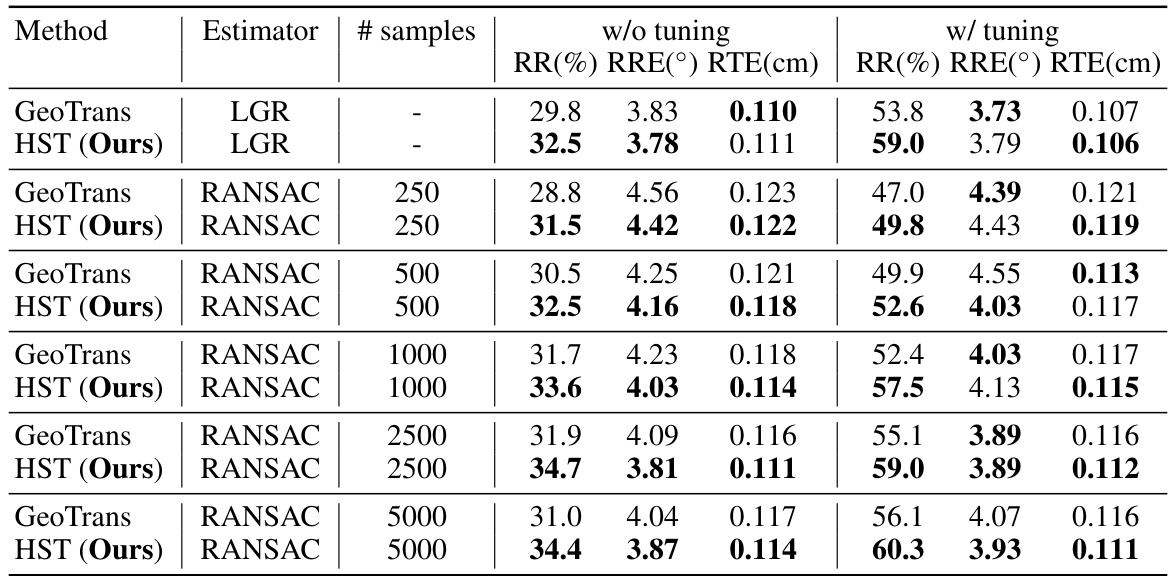
This figure shows the results of adding zero-mean Gaussian noise with increasing standard deviation to the 3DLoMatch dataset to test the robustness of the model. It compares the performance of HST, GeoTR, and CoFiNet in terms of registration recall (RR) as the noise point ratio increases. The results demonstrate that HST maintains the most stable performance compared to the others, indicating its superior noise resistance.
This figure illustrates the Hierarchical Sinkhorn Tree (HST) method for measuring multi-scale consistency (MSC) in 3D point cloud registration. The HST is a tree structure that processes local patches at multiple scales (coarse to fine). At each level, the similarity between corresponding patches is calculated using a Sinkhorn distance metric. This process continues down the tree, refining the consistency measure with each layer. The final MSC value is aggregated across all layers of the tree. The figure shows example patches at the coarse and fine scales, with their corresponding Sinkhorn distances.
More on tables
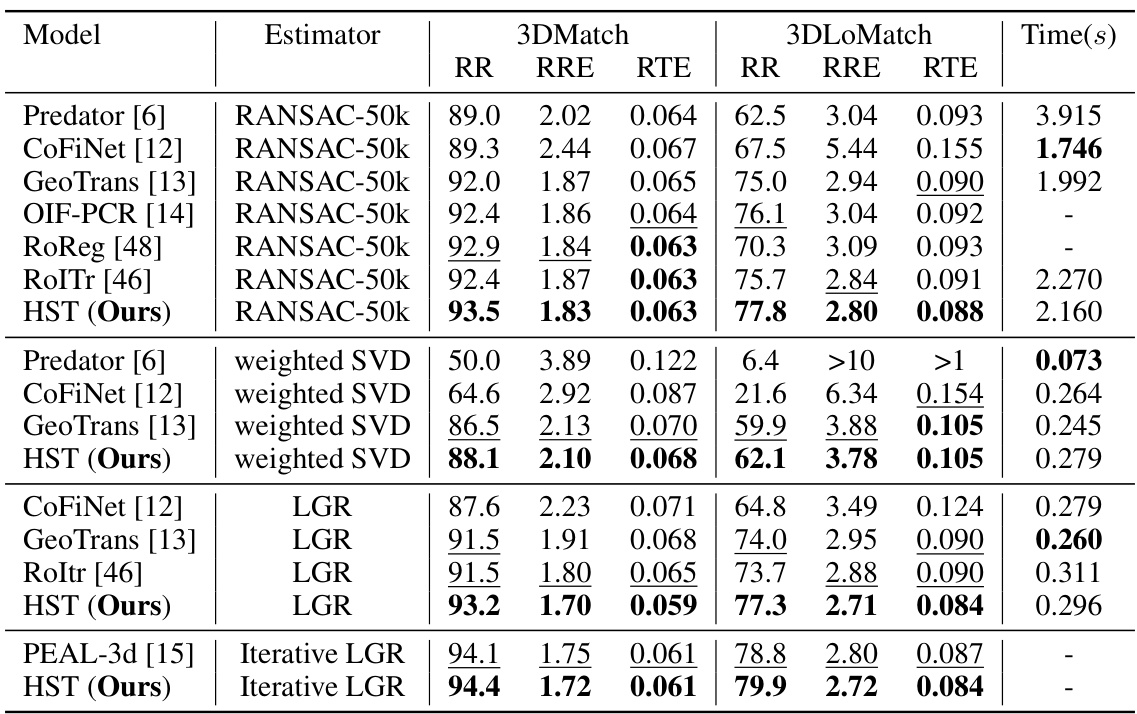
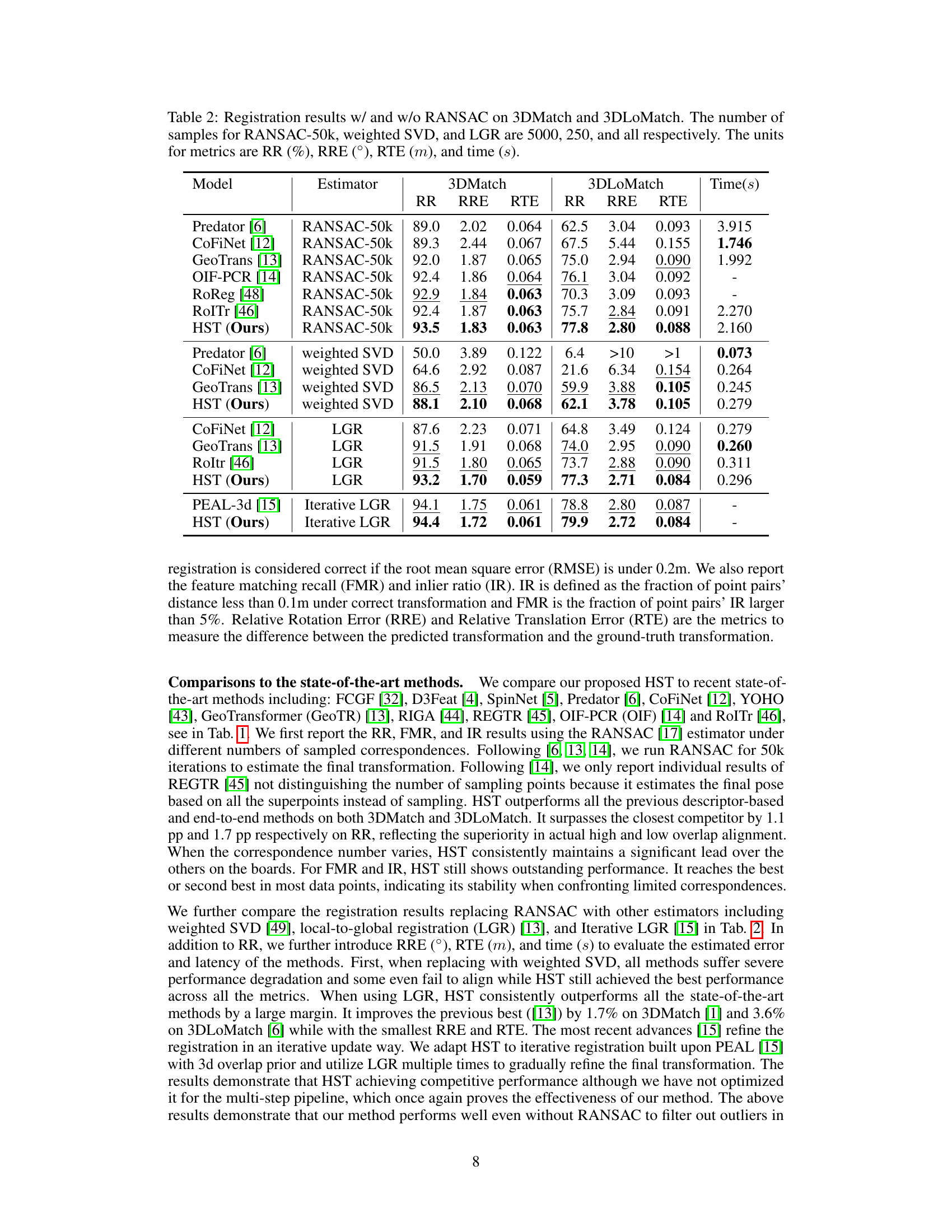
This table presents a comparison of registration results obtained using different estimators (RANSAC-50k, weighted SVD, LGR, Iterative LGR) on the 3DMatch and 3DLoMatch datasets. The table showcases the performance of various methods with and without using RANSAC for outlier removal. Metrics include Registration Recall (RR), Relative Rotation Error (RRE), Relative Translation Error (RTE), and processing Time. The number of samples used for each estimator is also specified.
This table presents a comparison of registration results obtained using different estimators (RANSAC, weighted SVD, LGR) on the 3DMatch and 3DLoMatch datasets, both with and without RANSAC outlier rejection. It shows the Registration Recall (RR), Relative Rotation Error (RRE), Relative Translation Error (RTE), and processing time for each method and estimator combination. The number of samples used for each estimator is also indicated.
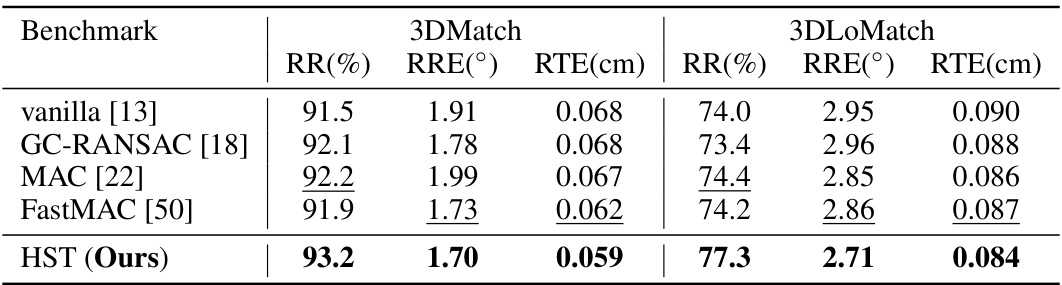
This table presents a comparison of registration results obtained using different estimators (RANSAC, weighted SVD, LGR, and iterative LGR) with and without RANSAC on the 3DMatch and 3DLoMatch datasets. The metrics used are Registration Recall (RR), Relative Rotation Error (RRE), Relative Translation Error (RTE), and processing time. Different numbers of samples were used for each estimator to ensure fair comparison. The table shows that HST consistently outperforms other methods across various metrics and estimators, highlighting its robustness and efficiency.
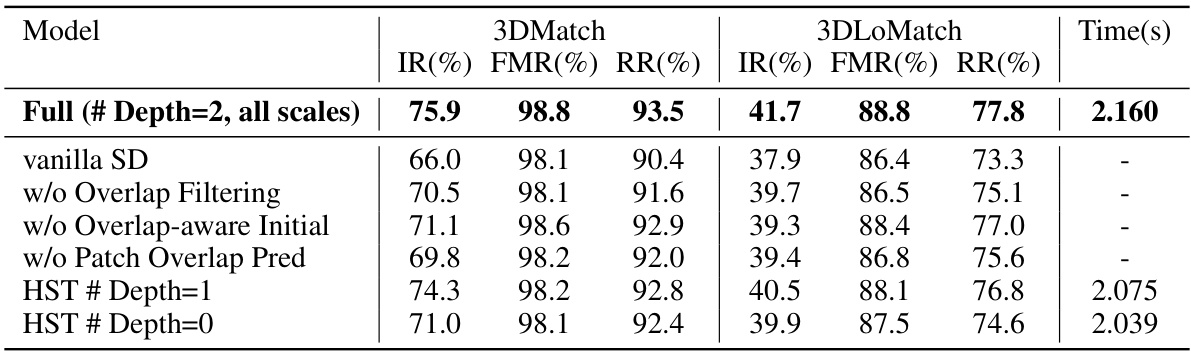
This ablation study analyzes the contribution of each component in the proposed HST method. It shows the impact of using the vanilla Sinkhorn Distance (without overlap filtering and overlap-aware initialization), removing the overlap filtering, removing the overlap-aware initialization, removing the patch overlap prediction module, and reducing the depth of the hierarchical structure. The results, measured in terms of Inlier Ratio (IR), False Match Rate (FMR), and Registration Recall (RR), demonstrate the effectiveness of each component in improving the robustness and accuracy of 3D point cloud registration.
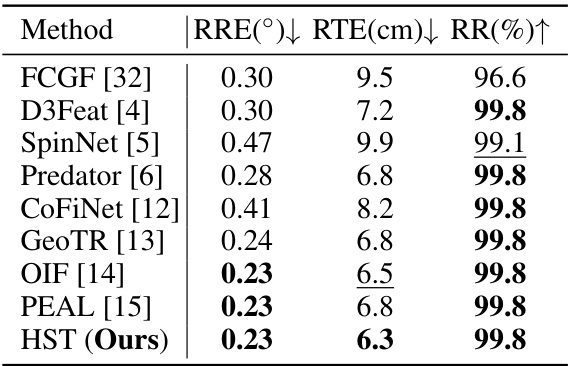
This table presents a comparison of the proposed HST method against other state-of-the-art point cloud registration methods on the KITTI odometry dataset. The metrics used for comparison are Relative Rotation Error (RRE), Relative Translation Error (RTE), and Registration Recall (RR). Lower RRE and RTE values indicate better accuracy, while a higher RR value signifies better registration performance. The results demonstrate HST’s performance compared to other methods.
This table presents the quantitative results of the proposed Hierarchical Sinkhorn Tree (HST) method and other state-of-the-art methods on two benchmark datasets: 3DMatch and 3DLoMatch. The results are shown in terms of Registration Recall (RR), Feature Matching Recall (FMR), and Inlier Ratio (IR), across various numbers of sampled correspondences (5000, 2500, 1000, 500, and 250). The table allows for a comparison of the HST method’s performance against existing techniques on datasets with varying levels of overlap and noise.
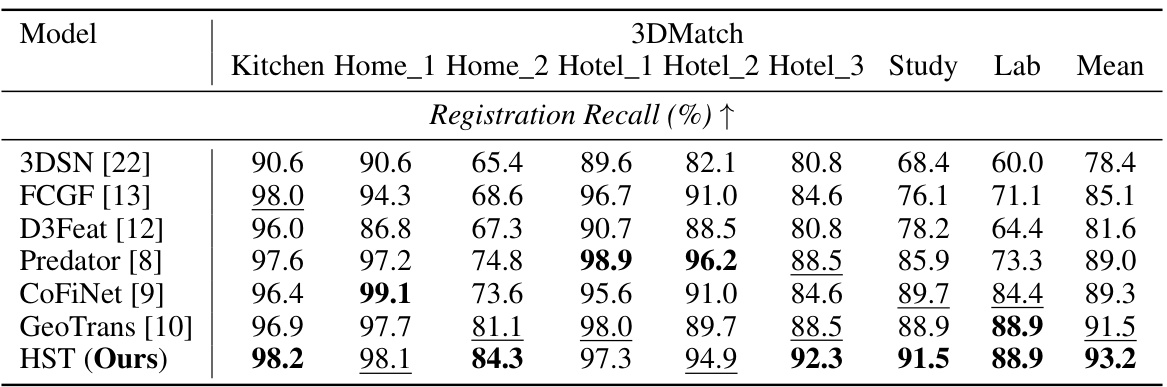
This table presents the quantitative results of the proposed Hierarchical Sinkhorn Tree (HST) method and other state-of-the-art methods on the 3DMatch and 3DLoMatch datasets. It shows Registration Recall (RR), Feature Matching Recall (FMR), and Inlier Ratio (IR) at different numbers of samples (5000, 2500, 1000, 500, and 250). The results demonstrate the superior performance of the HST method across various metrics and sample sizes on both datasets.
This table presents the quantitative results of the proposed Hierarchical Sinkhorn Tree (HST) method and other state-of-the-art methods on two benchmark datasets: 3DMatch and 3DLoMatch. For both datasets, the table shows the Registration Recall (RR), Feature Matching Recall (FMR), and Inlier Ratio (IR) achieved by each method under varying numbers of sample correspondences (5000, 2500, 1000, 500, 250). The results are presented separately for 3DMatch and 3DLoMatch to highlight the performance differences between the two datasets. Higher values indicate better performance.

This ablation study analyzes the contribution of each component in the proposed HST model by removing or replacing one component at a time. The results show the impact of each component on registration recall (RR), inlier ratio (IR), and false match rate (FMR) metrics for both 3DMatch and 3DLoMatch datasets. The study highlights the importance of overlap-aware Sinkhorn distance, overlap filtering, and multi-scale consistency modeling in achieving high performance.
Full paper#