↗ OpenReview ↗ NeurIPS Homepage ↗ Chat
TL;DR#
Open-set 3D object retrieval faces the challenge of identifying objects from unseen categories during testing, unlike closed-set retrieval where training and testing sets share categories. Existing methods often underutilize the shared characteristics in part-level shapes across categories. This paper addresses these limitations. The proposed Hypergraph-Based Assembly Fuzzy Representation (HAFR) framework is designed to address these challenges by using a bottom-up approach, starting from part-level features and assembling them into object representations, hence, utilizing the commonalities in part-level shapes of objects.
HAFR uses Hypergraph Isomorphism Convolution (HIConv) to smooth features and Isomorphic Assembly Embedding (IAE) to generate geometric-semantic consistent embeddings. To address open-set generalization, it employs Structure Fuzzy Reconstruction (SFR) with a leverage hypergraph that captures correlations between seen and unseen categories, mitigating distribution skew. Experiments on three new open-set datasets (OP-SHNP, OP-INTRA, OP-COSEG) demonstrate that HAFR significantly outperforms existing methods, showcasing its effectiveness in handling unseen object categories. HAFR’s success highlights the potential of assembly-based representation and fuzzy reconstruction techniques for open-set 3D object retrieval.
Key Takeaways#
Why does it matter?#
This paper is significant because it tackles the challenging problem of open-set 3D object retrieval by leveraging part-level information and fuzzy representation. It introduces a novel framework, HAFR, that outperforms current state-of-the-art methods, opening new avenues for research in open-set recognition and 3D shape understanding. The creation of three new open-set datasets further enhances the value of this contribution for the research community. The advancements in assembly-based representation and fuzzy reconstruction are especially relevant to the ongoing trend of developing robust and generalizable 3D object retrieval systems.
Visual Insights#
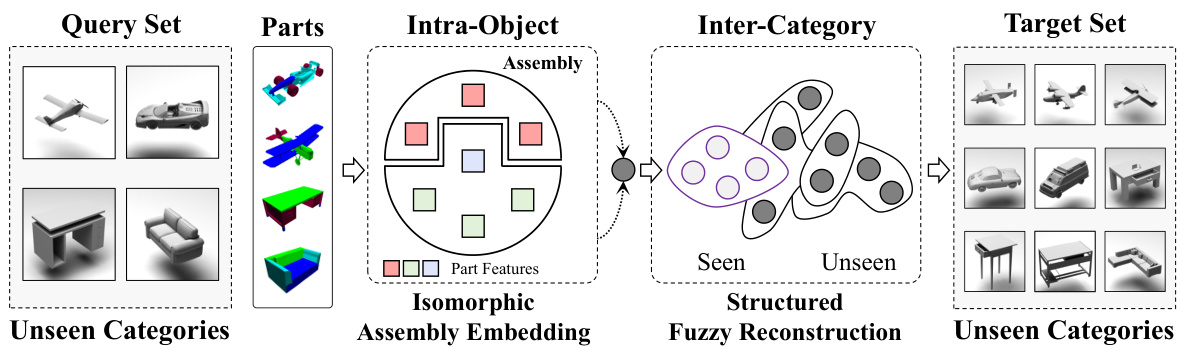
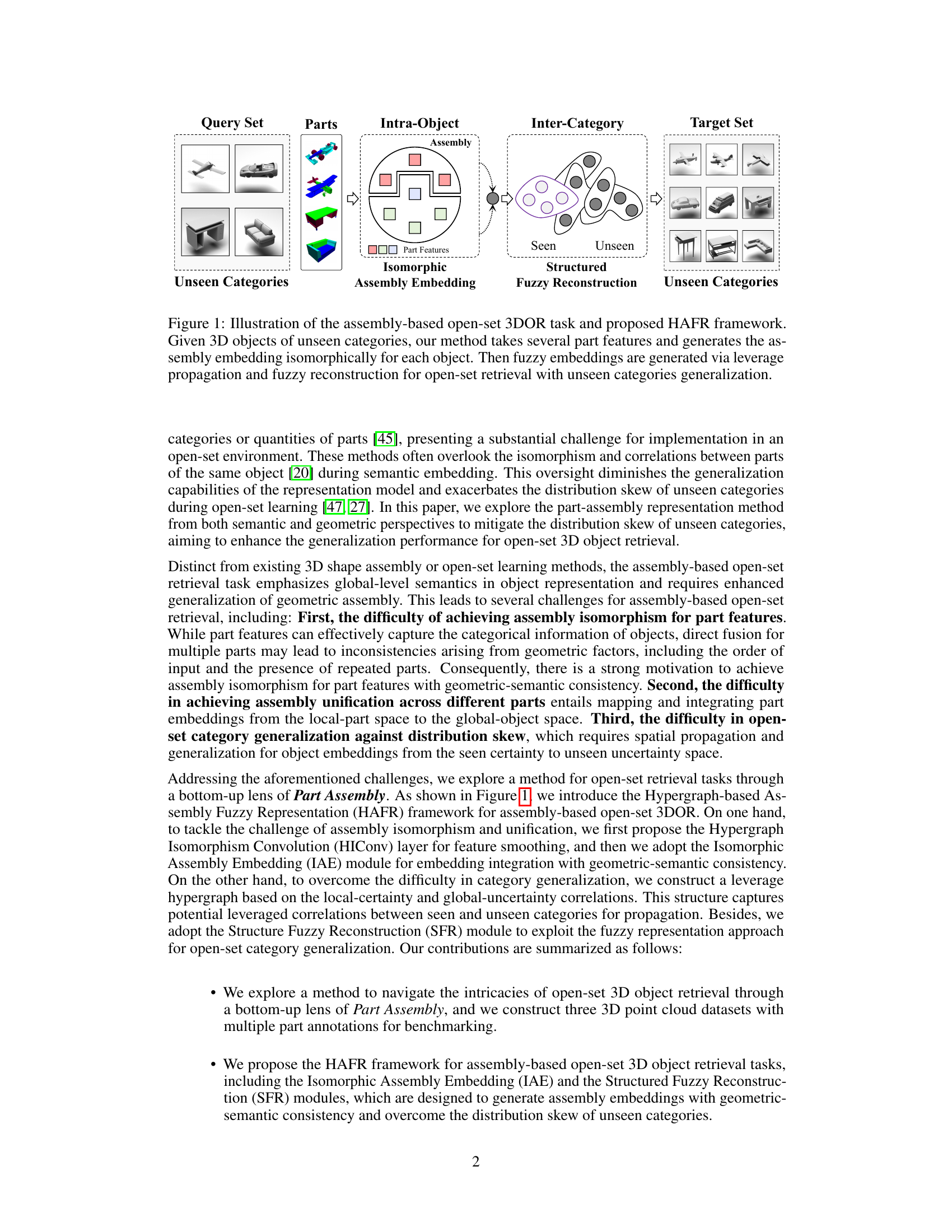
This figure illustrates the overall workflow of the proposed HAFR framework for open-set 3D object retrieval. It begins with a query set and target set of 3D objects, each composed of multiple parts. The framework then performs isomorphic assembly embedding to create a unified representation from the parts, and finally, it uses structured fuzzy reconstruction to handle unseen categories and generate fuzzy embeddings suitable for retrieval. The process is designed to address the challenges posed by the lack of object-level labels and the presence of unseen categories in open-set scenarios.
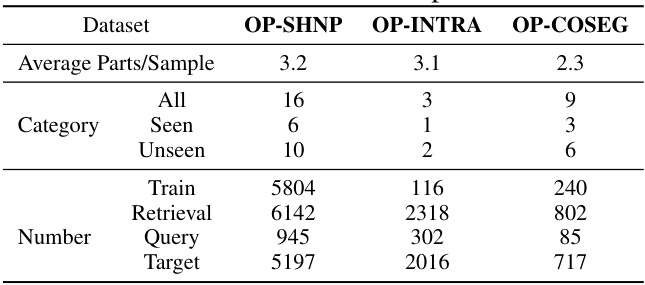
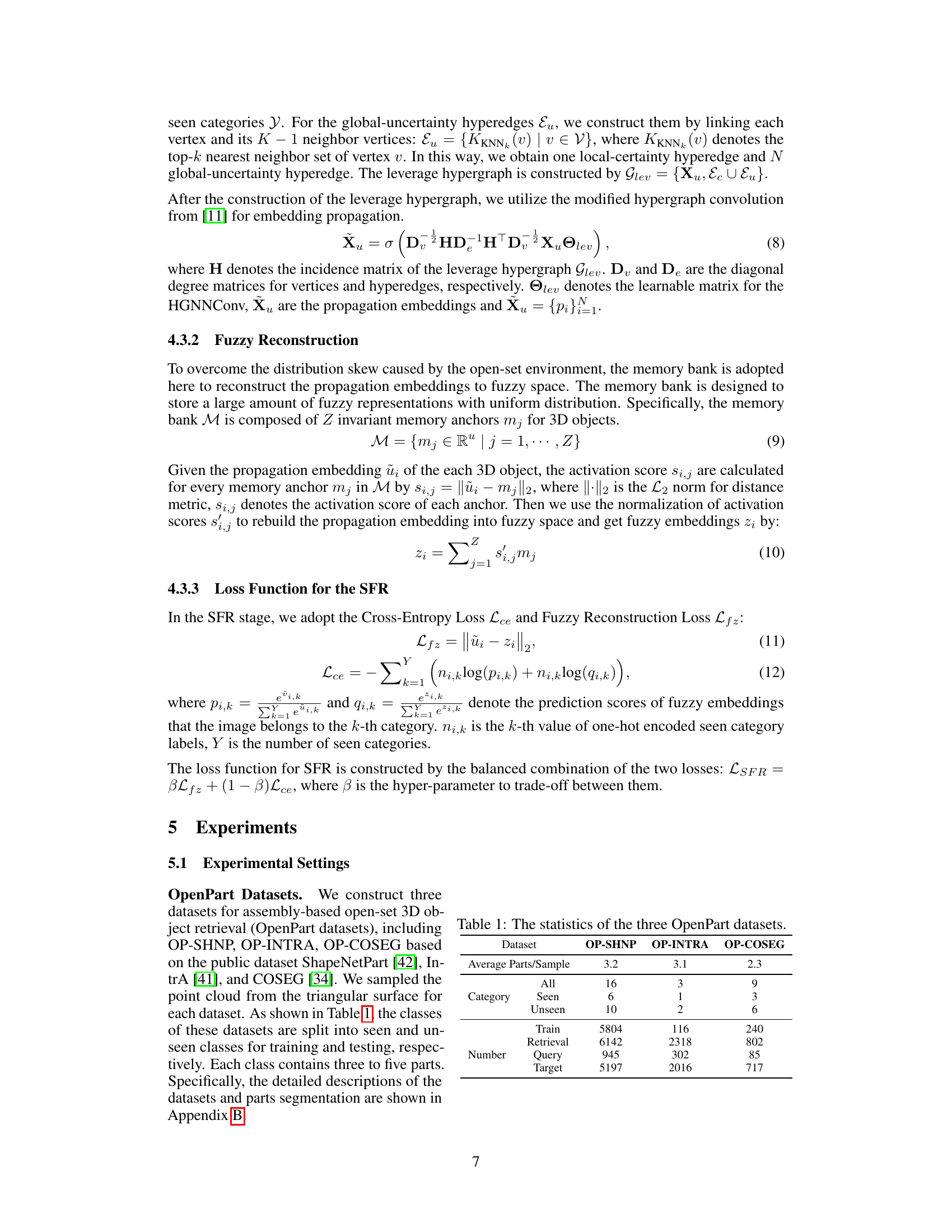
This table presents a statistical summary of three datasets used in the paper: OP-SHNP, OP-INTRA, and OP-COSEG. For each dataset, it shows the average number of parts per sample, the total number of categories (both seen and unseen during training and testing), and the number of samples in the training, retrieval (testing), query, and target sets.
In-depth insights#
Assembly Fuzzy Rep#
The heading ‘Assembly Fuzzy Rep’ suggests a novel approach to representing and processing data, likely in the context of 3D object retrieval. The term ‘Assembly’ points towards a method that constructs representations from smaller constituent parts, rather than dealing with the entire object at once. This could offer advantages in handling complex objects and variations within classes. The addition of ‘Fuzzy’ implies that the representation incorporates uncertainty and ambiguity. Instead of crisp categories, it might employ fuzzy logic, enabling graceful handling of objects that straddle multiple classes or possess ambiguous features. Combining ‘Assembly’ and ‘Fuzzy’ suggests a system that builds a fuzzy model from parts, potentially resulting in a more robust and adaptable system for tasks such as object retrieval, especially in open-set scenarios where unseen object types are likely to appear. The effectiveness of this approach would likely depend on the design of the part segmentation, the fuzzy inference system used, and the overall architecture of the system.
Hypergraph Conv#
The concept of ‘Hypergraph Conv,’ while not explicitly a heading in the provided text, strongly suggests a novel convolutional operation defined on hypergraphs. This implies a move beyond traditional graph convolutions, which operate on simpler graph structures. Hypergraphs, with their ability to represent higher-order relationships (edges connecting multiple nodes), offer a richer representation than standard graphs. The likely innovation lies in how the convolutional filter is designed to interact with hyperedges, potentially using techniques that aggregate information across higher-order connections. This would enable learning complex, multifaceted relationships within the data. Such a convolution would likely improve performance on tasks demanding the understanding of multi-way interactions, offering a powerful tool for tasks such as 3D object retrieval where part-level relationships are crucial for accurate classification.
Open-Set 3D OR#
Open-set 3D object retrieval (OR) presents a significant challenge due to the lack of exhaustive object-level labels in training data. Existing methods often struggle with unseen categories during testing. This paper tackles this problem by focusing on part-level shape information, recognizing that parts often share commonalities across different object categories. This part-level approach allows for better generalization to novel object classes. The use of hypergraphs to represent part relationships adds another layer of sophistication, enabling the capture of higher-order correlations between parts and improving representation. The method further addresses the open-set challenge through fuzzy representations, enhancing the model’s ability to handle uncertainty and the inherent distribution skew of unseen categories. The incorporation of isomorphism convolutions and assembly embeddings ensures that the representation is consistent and robust to variations in part arrangements.
Ablation Studies#
Ablation studies systematically remove or modify components of a machine learning model to assess their individual contributions. In this context, it is crucial to isolate the effects of each part to understand how each module, such as the Hypergraph Isomorphism Convolution (HIConv) or the Structured Fuzzy Reconstruction (SFR) module, affects the overall performance. The results from these experiments will show if the improvements are significant and directly attributable to the specific component, or if the effect is marginal or even negative. By carefully analyzing the change in performance metrics (such as mAP, NDCG, ANMRR) after each ablation, one can understand which parts are crucial for the model’s success. This methodology allows for a deeper understanding of the model’s architecture and assists in identifying redundant or less effective elements, leading to potential model simplification and improvement.
Future Works#
Future work could explore several promising directions. Extending the HAFR framework to handle a larger variety of part types and numbers per object would improve its robustness and applicability to more complex scenes. Currently, the approach focuses on a relatively fixed number of parts, limiting the expressiveness of the representations. Investigating alternative hypergraph designs could enhance the model’s ability to capture intricate relationships between parts, potentially through dynamic hypergraph construction or the incorporation of edge features representing part interactions. A detailed analysis of the impact of various hypergraph convolutional layers on performance is also warranted. The experiments could be extended to include more challenging datasets with greater variations in object complexity and viewpoint. Further development of the fuzzy reconstruction module, perhaps by incorporating more sophisticated fuzzy logic or exploring alternative methods for handling unseen categories, would be beneficial. Lastly, evaluating the effectiveness of the HAFR framework in various downstream tasks such as 3D object classification and segmentation would further demonstrate its utility and potential.
More visual insights#
More on figures
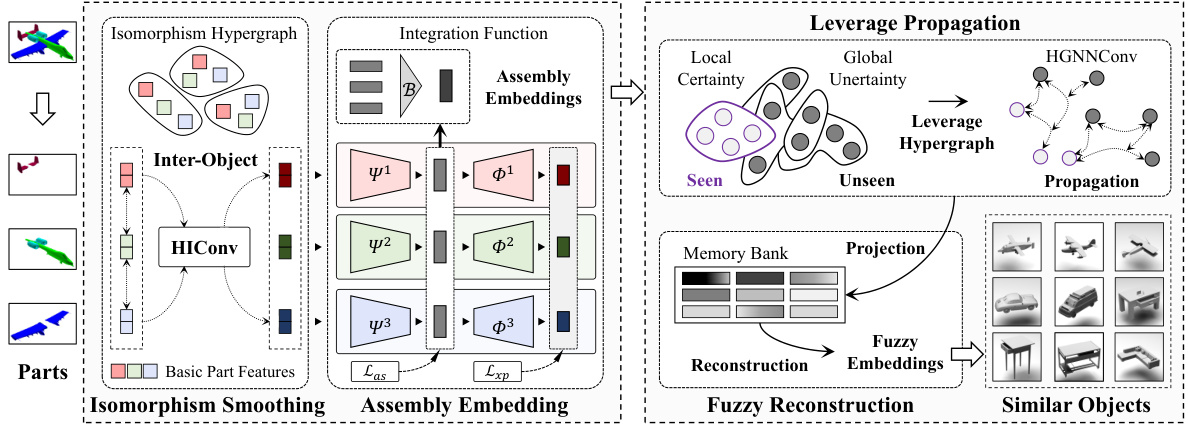
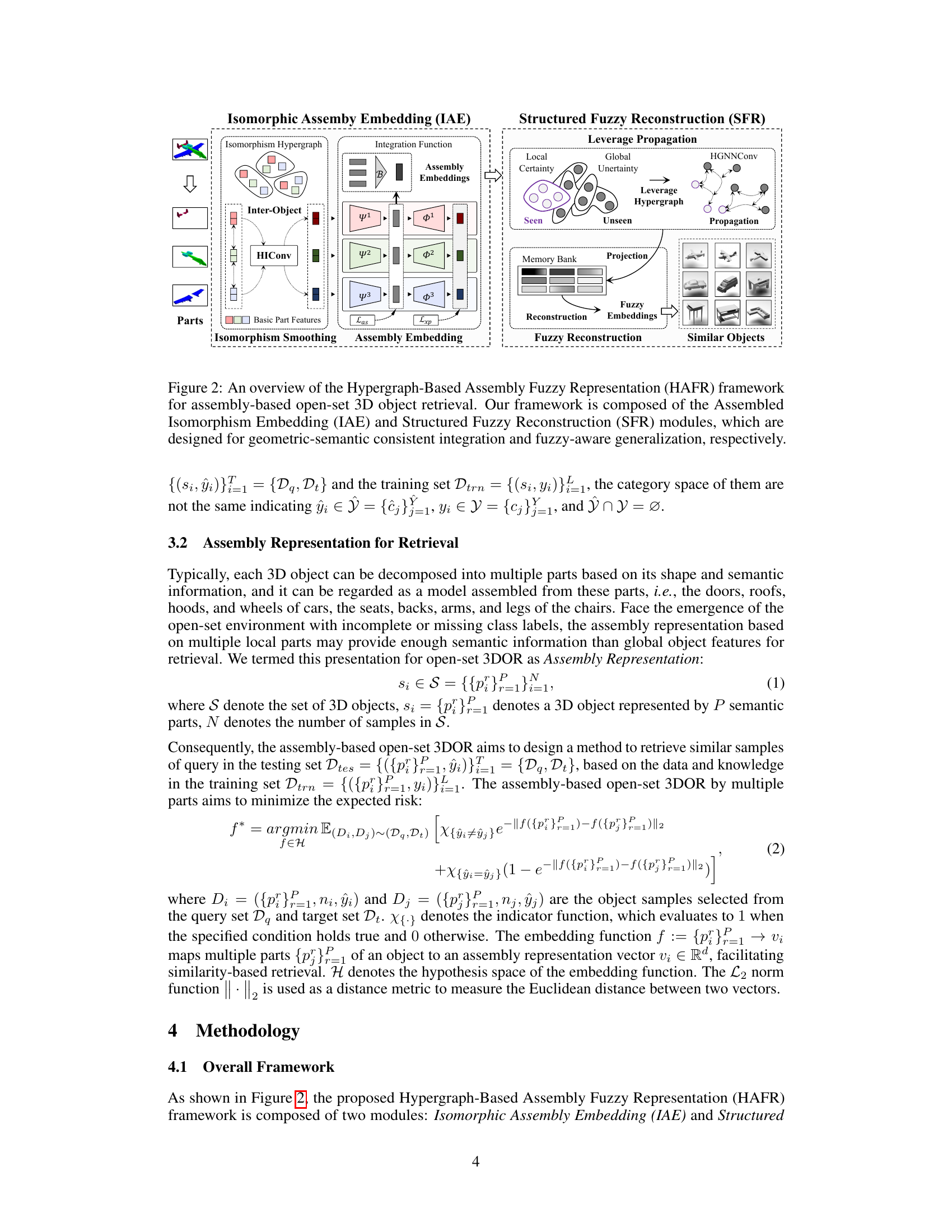
This figure illustrates the HAFR framework, which consists of two main modules: IAE (Isomorphic Assembly Embedding) and SFR (Structured Fuzzy Reconstruction). The IAE module uses Hypergraph Isomorphism Convolution to generate geometric-semantic consistent assembly embeddings. The SFR module leverages a hypergraph structure based on local certainty and global uncertainty to perform fuzzy reconstruction and generate fuzzy embeddings for open-set retrieval.
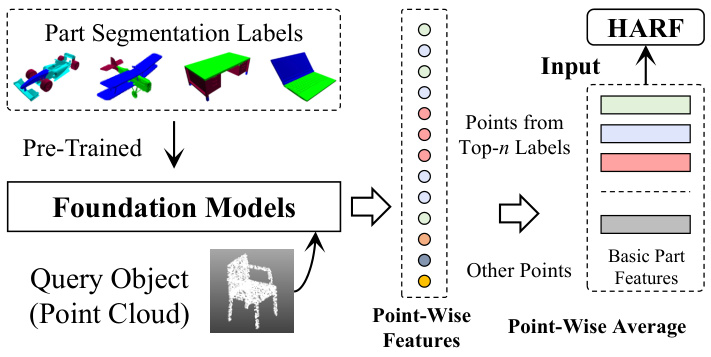
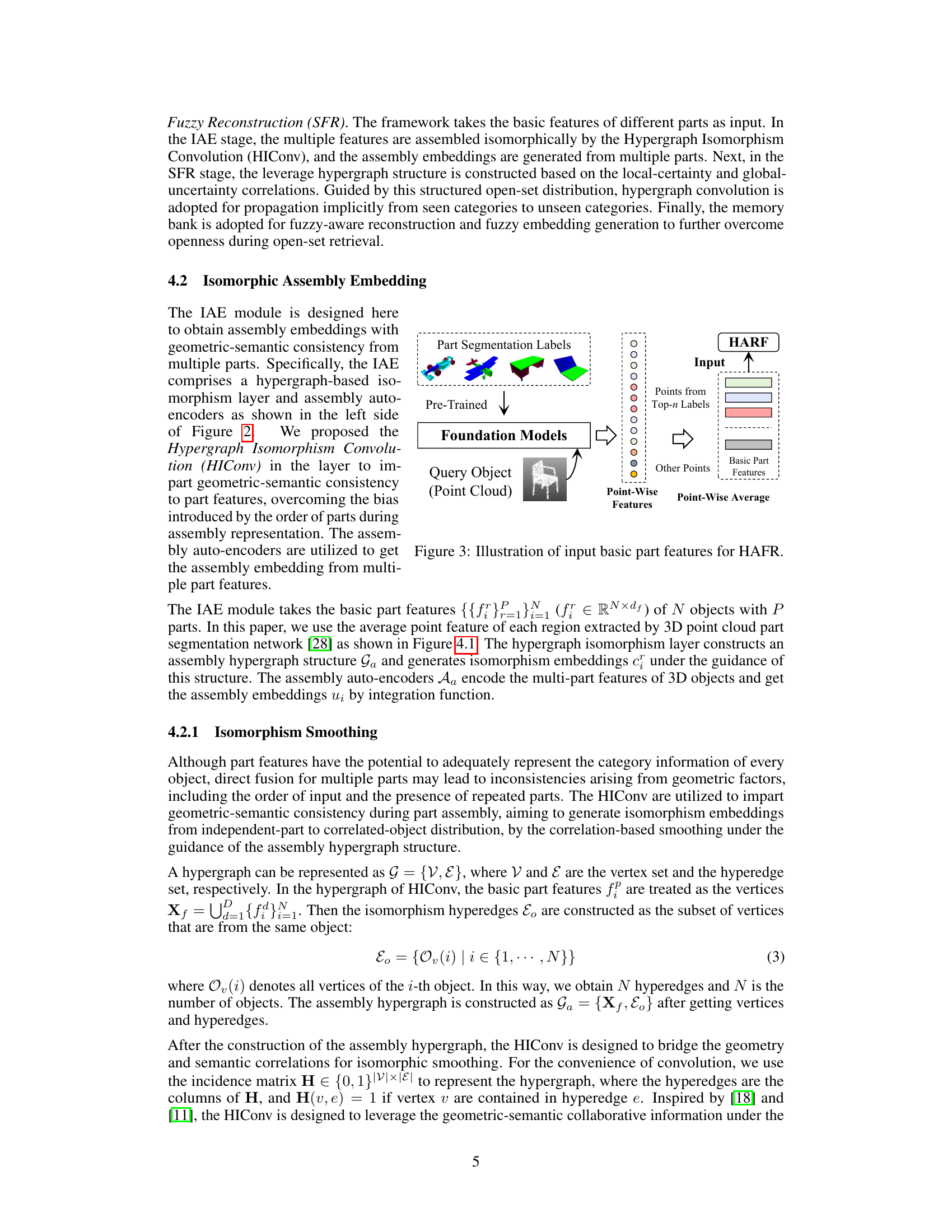
This figure illustrates the input features used in the HAFR (Hypergraph-Based Assembly Fuzzy Representation) framework. It shows how part segmentation labels from pre-trained foundation models are used to extract basic part features (point-wise features and their point-wise averages) for each object. The input to the HAFR framework comprises points from top-n labels, other points, and point-wise features that are used to generate the basic part features that are used by the HAFR framework.
This figure provides a detailed overview of the HAFR framework, which consists of two main modules: IAE and SFR. The IAE module handles isomorphic assembly embedding, ensuring geometric and semantic consistency. The SFR module focuses on structured fuzzy reconstruction for generalization to unseen categories. The figure visually represents the data flow and processing steps within each module, illustrating how part features are processed to generate assembly and fuzzy embeddings for 3D object retrieval.
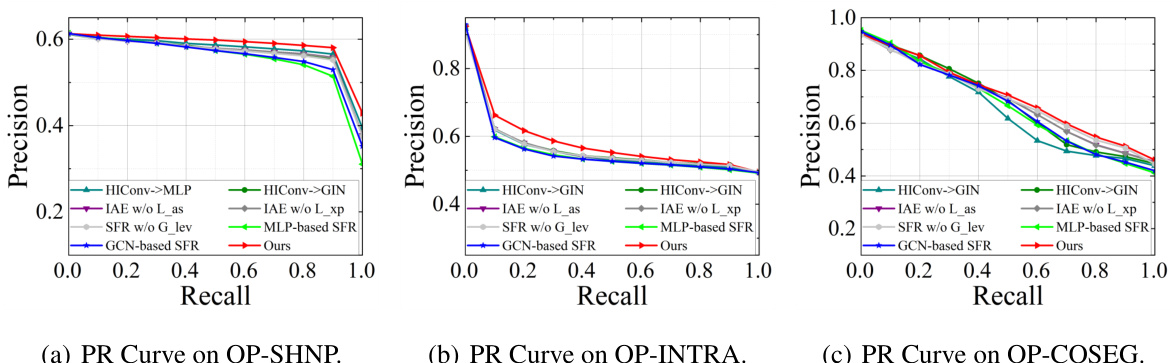
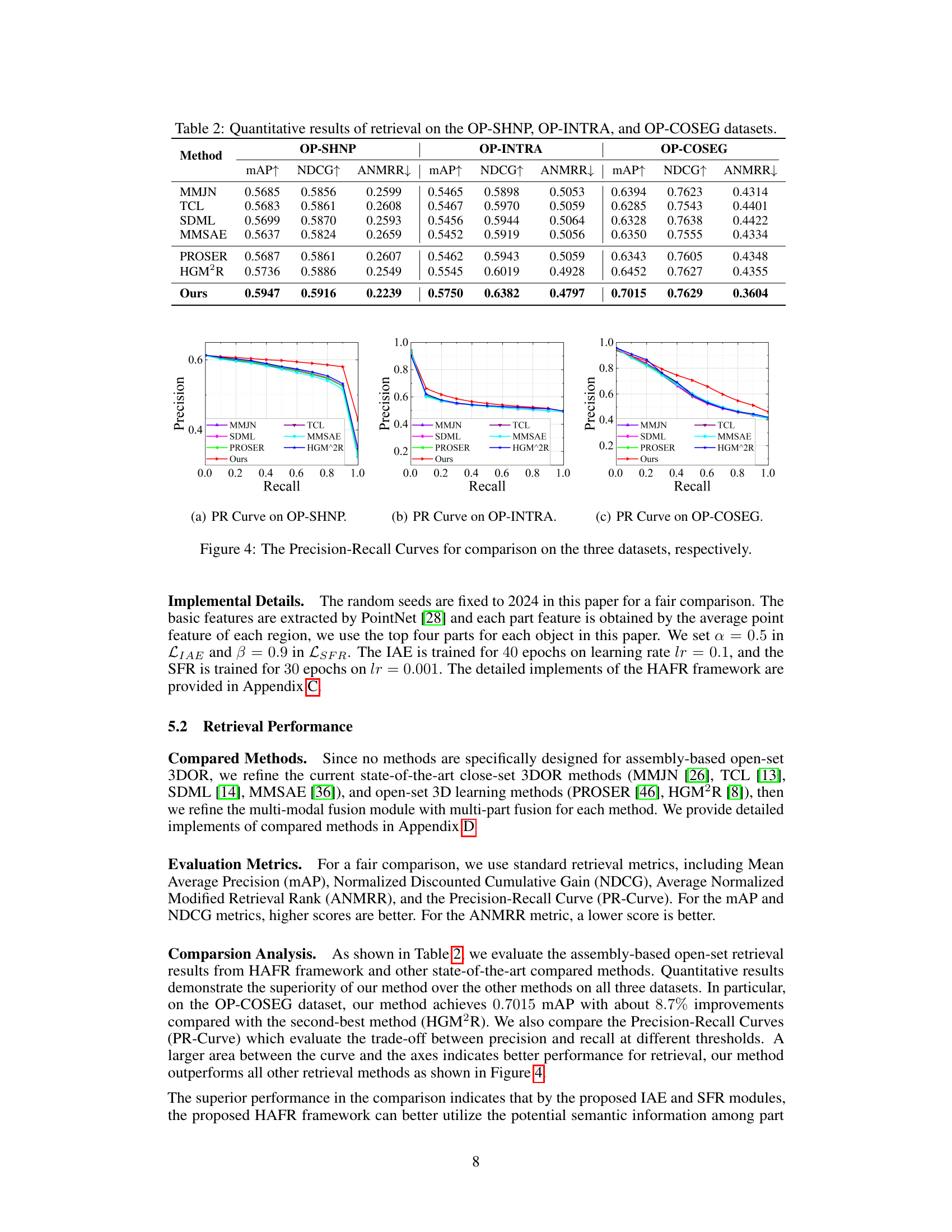
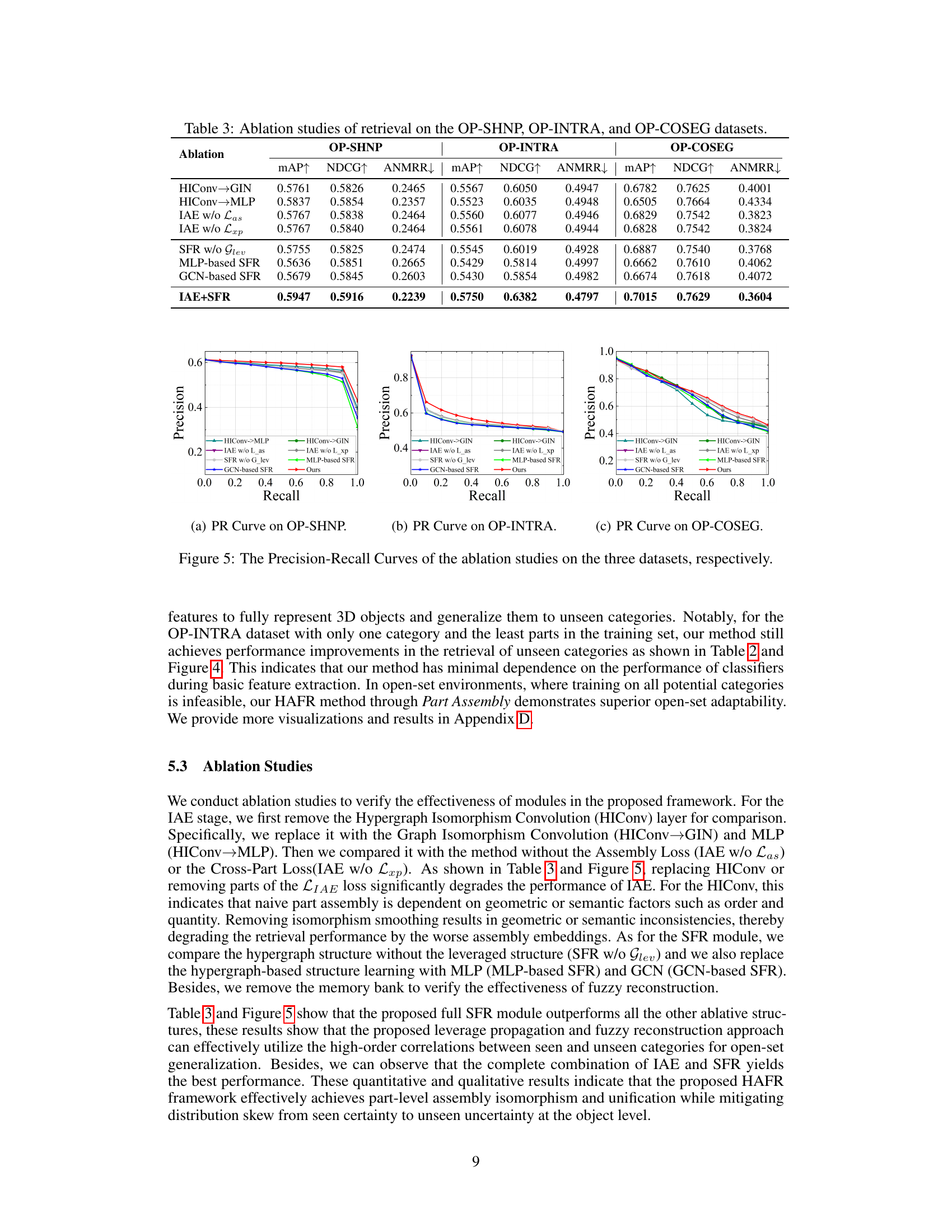
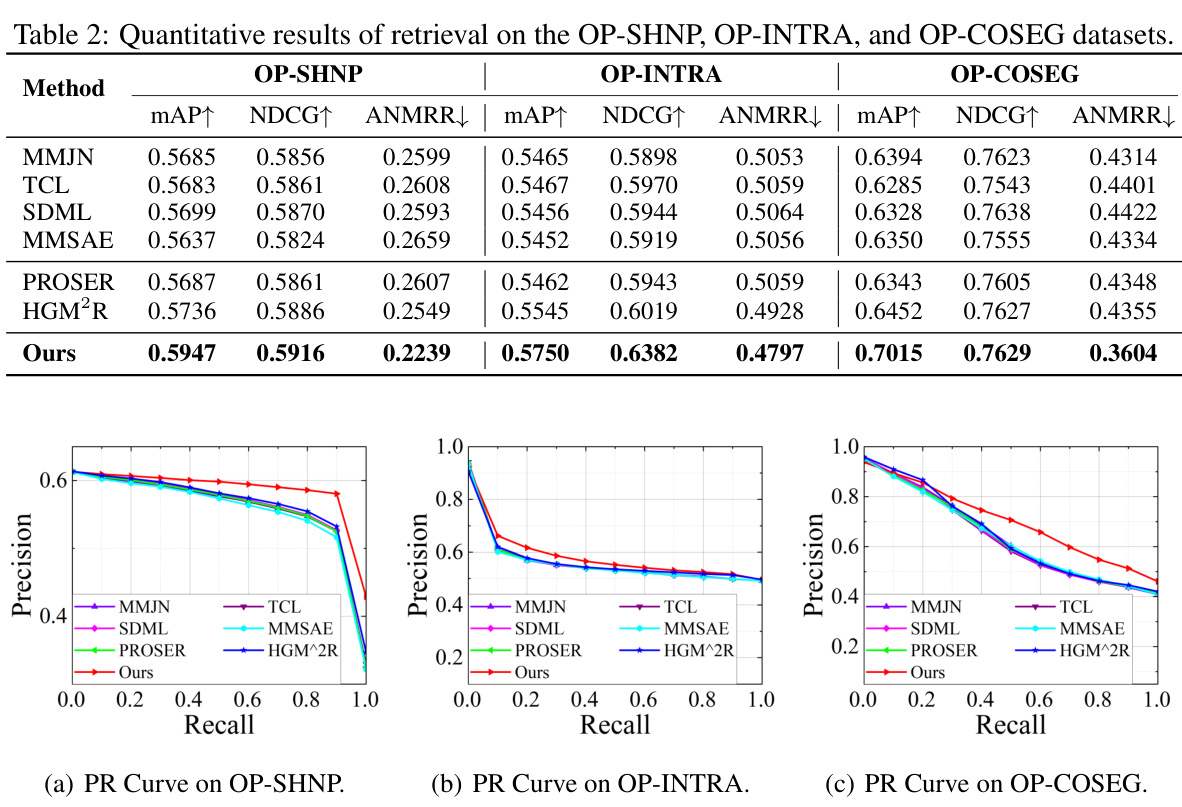
This figure presents the precision-recall curves for three datasets (OP-SHNP, OP-INTRA, and OP-COSEG) resulting from ablation studies. It compares the performance of the proposed HAFR framework against variations, such as removing components (HIConv, IAE loss terms, SFR components), or replacing components with simpler alternatives (MLP, GCN). This visualization allows for a direct comparison of the impact of each component on the overall performance of the model in terms of precision and recall across different retrieval tasks. It is a key figure for understanding the contribution of each component of the proposed HAFR framework.
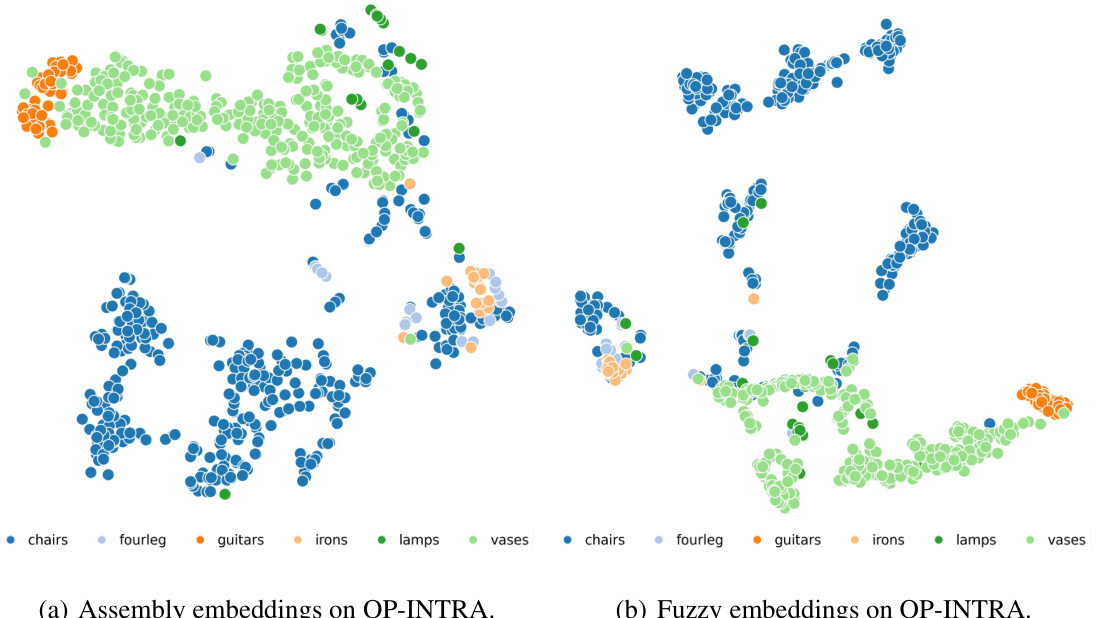
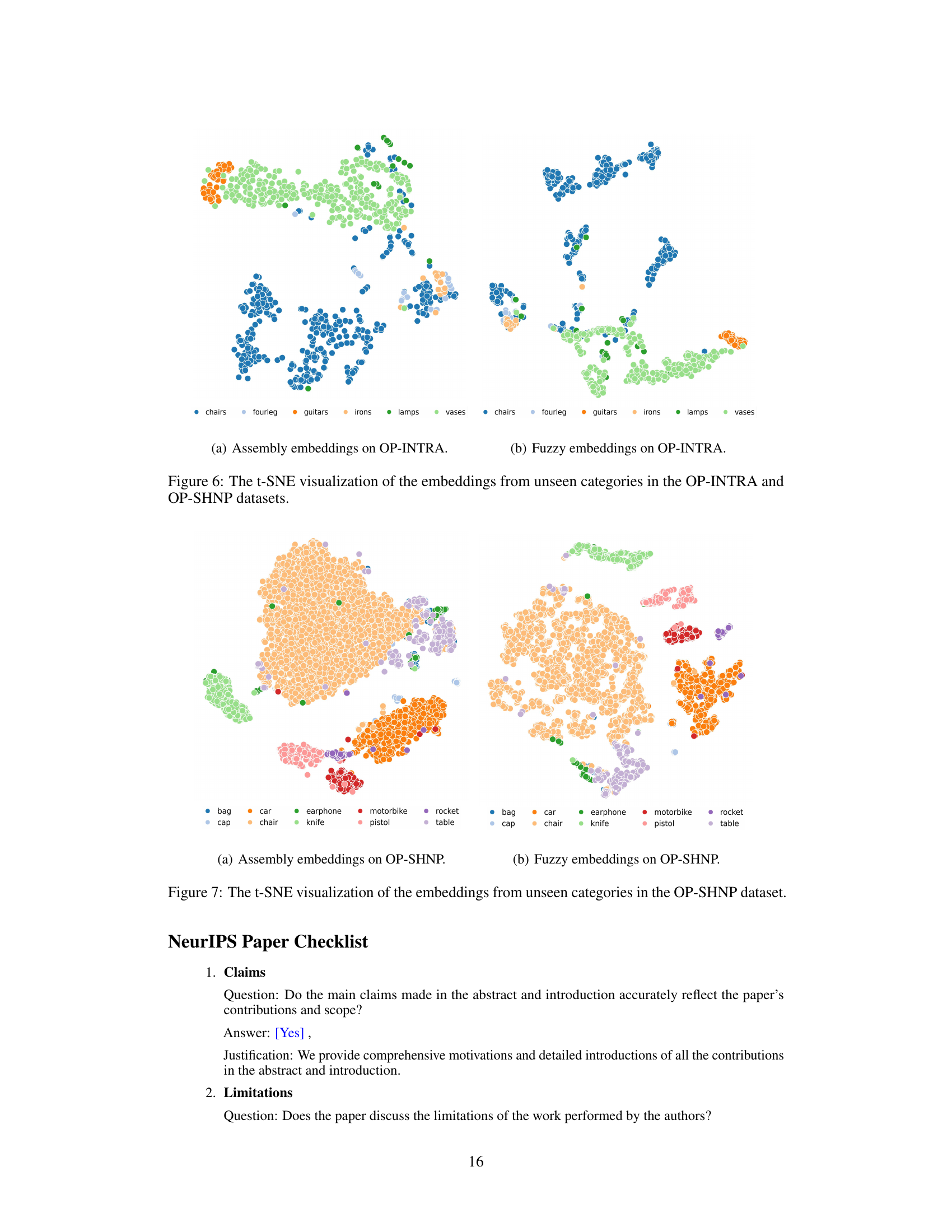
This figure shows the t-distributed Stochastic Neighbor Embedding (t-SNE) visualizations of the assembly and fuzzy embeddings for unseen categories in the OP-INTRA and OP-SHNP datasets. t-SNE is a dimensionality reduction technique used to visualize high-dimensional data in a lower-dimensional space while preserving the local neighborhood structure. The visualizations help to understand how well the proposed method separates unseen object categories in the embedding space. Different colors represent different object categories. The left column (a) presents assembly embeddings before fuzzy reconstruction, and the right column (b) shows the fuzzy embeddings after reconstruction. By comparing the two columns, one can visually assess the effectiveness of the fuzzy reconstruction module in improving the separability of unseen categories.
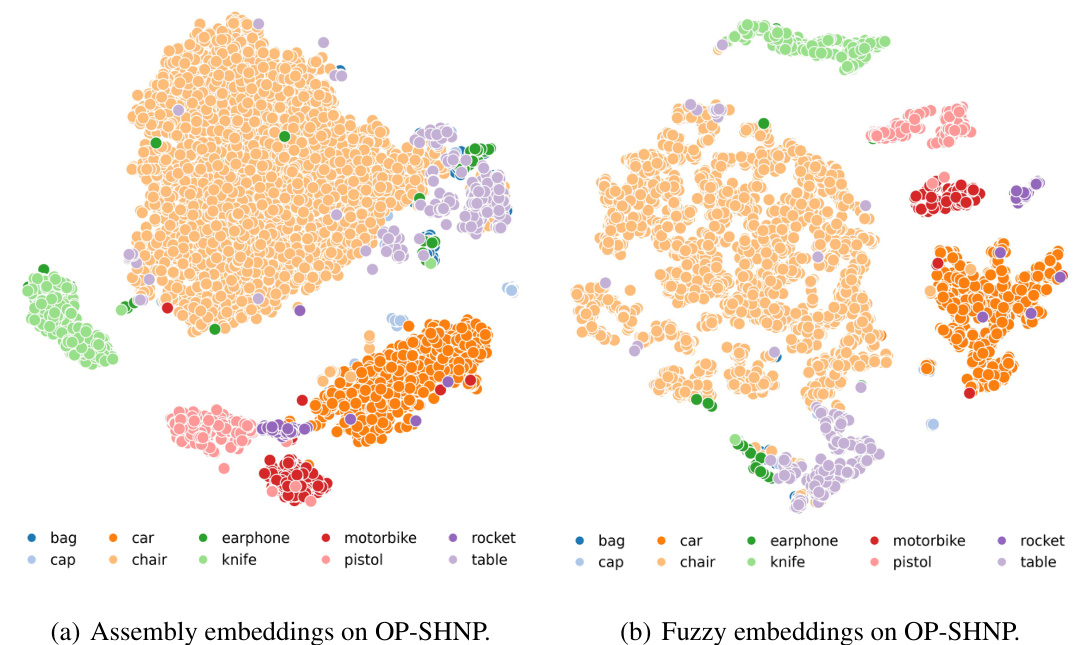
This figure shows the t-SNE visualization of the assembly embeddings (left) and fuzzy embeddings (right) for unseen categories in the OP-SHNP dataset. t-SNE is a dimensionality reduction technique used to visualize high-dimensional data in a lower-dimensional space. The different colors represent different unseen object categories. The visualizations are intended to show how well the model separates different unseen categories using the proposed assembly and fuzzy reconstruction methods. The goal is to show the effectiveness of the proposed approach at handling open-set object retrieval challenges.
More on tables
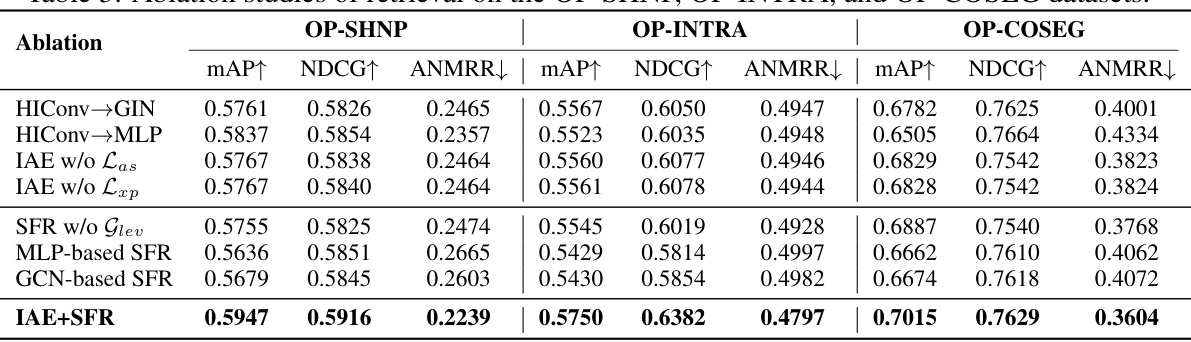
This table presents the results of ablation studies conducted to evaluate the individual contributions of different modules within the proposed HAFR framework. It compares the performance of the full model against versions where key components (HIConv, IAE loss terms, SFR module, and the type of hypergraph convolution used) have been removed or replaced with simpler alternatives. The metrics used are mAP, NDCG, and ANMRR, evaluated on three datasets (OP-SHNP, OP-INTRA, and OP-COSEG). The results demonstrate the importance of each module for achieving optimal performance.

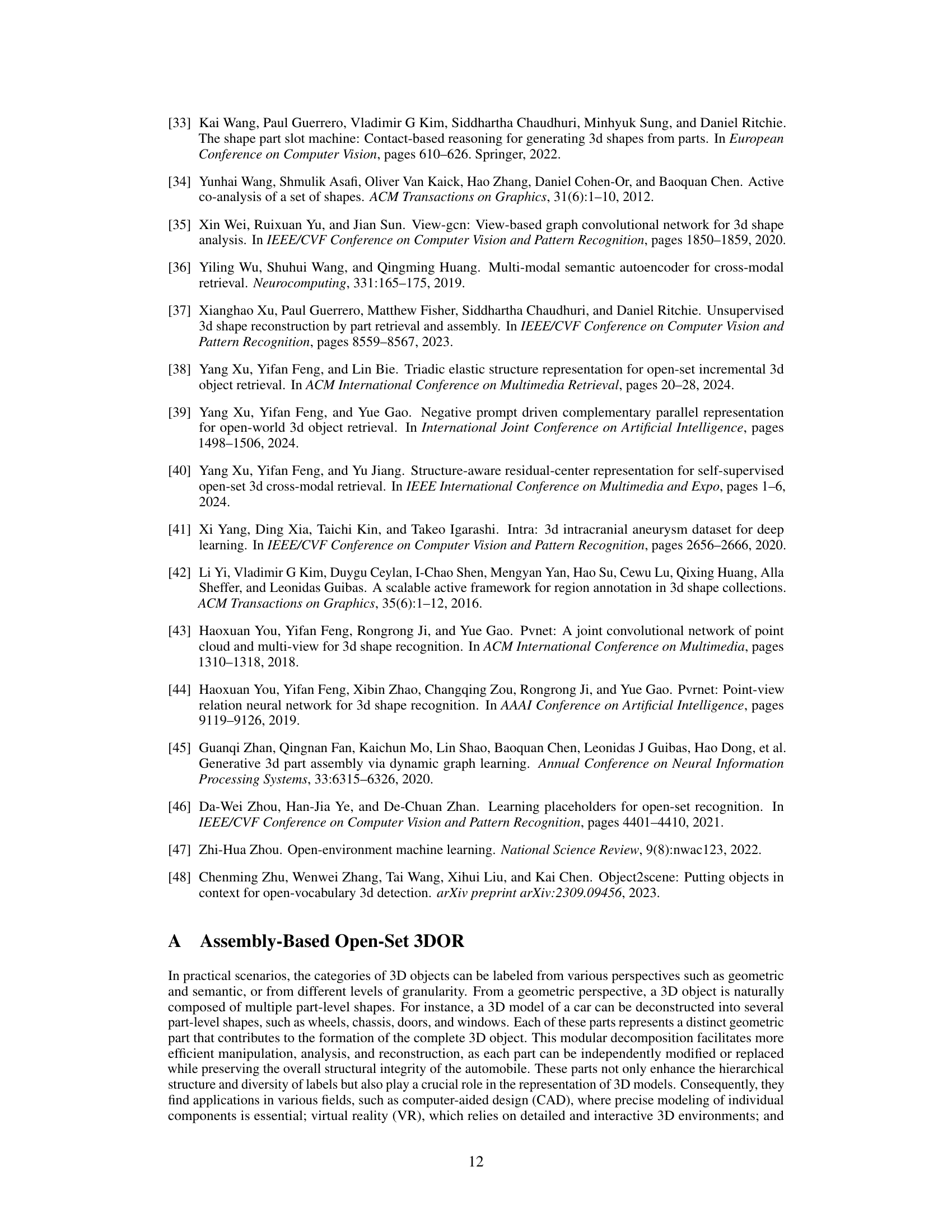
This table shows how the categories in the three datasets (OP-SHNP, OP-INTRA, and OP-COSEG) are divided into seen (training set) and unseen (testing set) categories for open-set 3D object retrieval experiments. The ‘seen’ categories are those that the model is trained on, while the ‘unseen’ categories represent those the model encounters for the first time during testing, simulating a real-world open-set scenario.
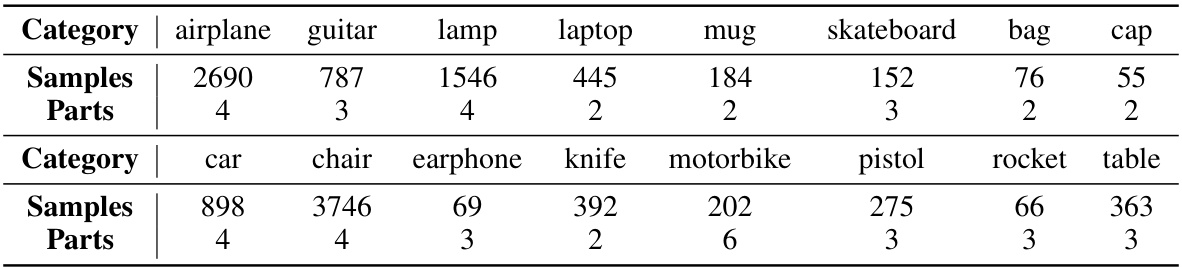
This table provides a detailed statistical overview of the OP-SHNP dataset. It lists the number of samples and parts for each of the ten categories in the dataset: airplane, guitar, lamp, laptop, mug, skateboard, bag, cap, car, and chair. The ‘Samples’ column shows the number of instances of each object category included in the dataset, and the ‘Parts’ column indicates how many parts each object in that category is segmented into.

This table provides a detailed statistical overview of the OP-COSEG dataset. It lists the number of samples and the average number of parts per sample for each category in the dataset.

This table presents a statistical summary of the OP-INTRA dataset, one of three open-set 3D object retrieval datasets used in the paper. It shows the number of samples and the average number of parts per sample for each category within the dataset: mixed, aneurysm, and vessel.
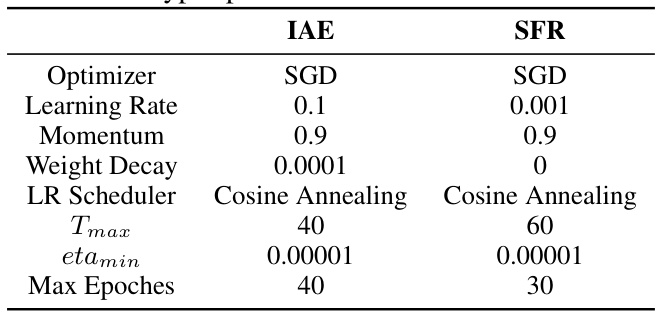
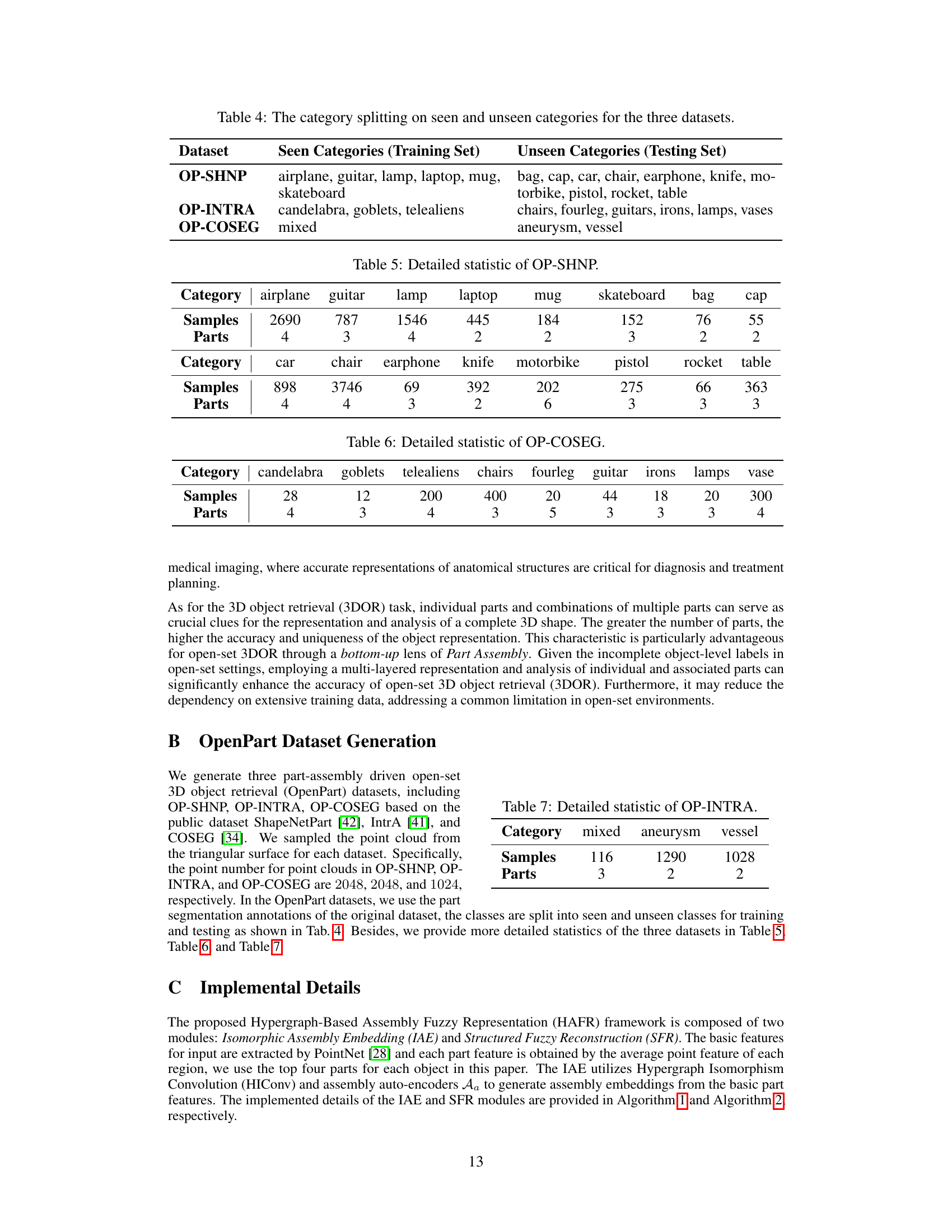
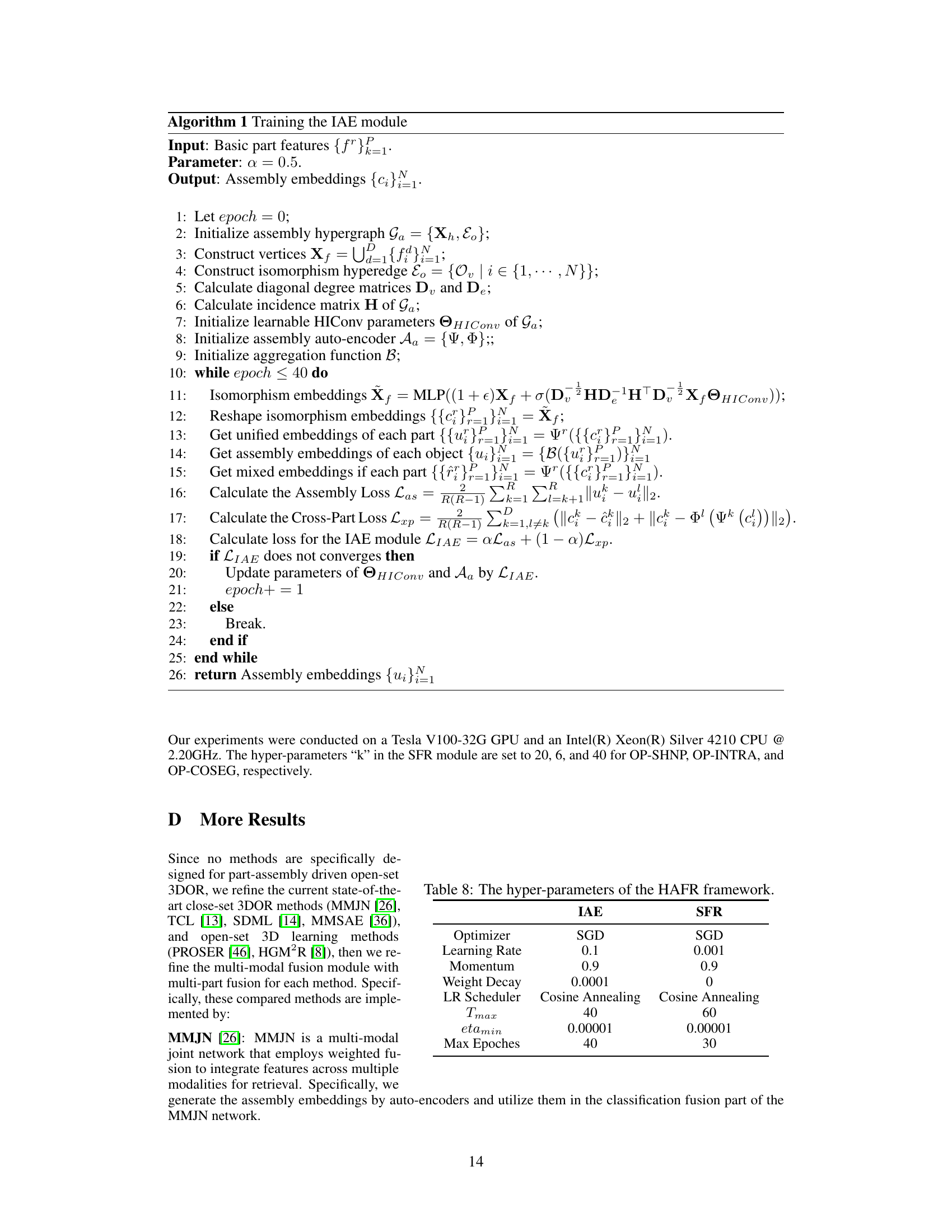
This table lists the hyperparameters used in the HAFR (Hypergraph-Based Assembly Fuzzy Representation) framework. It shows the settings for both the IAE (Isomorphic Assembly Embedding) and SFR (Structured Fuzzy Reconstruction) modules. The hyperparameters include the optimizer, learning rate, momentum, weight decay, learning rate scheduler, maximum number of epochs, and minimum learning rate.
Full paper#