↗ OpenReview ↗ NeurIPS Homepage ↗ Chat
TL;DR#
3D human pose estimation (HPE) is crucial for many applications, but current methods face two major limitations: limited data diversity (popularity bias) and depth ambiguity (multiple 3D interpretations from a single 2D pose). Existing approaches using data augmentation from limited datasets haven’t fully resolved these issues. The lack of diverse training data leads to poor generalization to real-world scenarios, while depth ambiguity reduces accuracy, especially in complex poses.
This paper introduces two novel techniques to overcome these limitations. The Biomechanical Pose Generator (BPG) uses biomechanical principles to create a wide array of plausible 3D poses without relying on existing datasets, addressing the data diversity issue. The Binary Depth Coordinates (BDC) simplify depth estimation into a binary classification, significantly reducing ambiguity. Experimental results demonstrate that these methods consistently improve the accuracy and robustness of HPE models, especially in challenging scenarios with high pose diversity and depth ambiguity.
Key Takeaways#
Why does it matter?#
This paper is crucial because it tackles the scalability challenges in 3D human pose estimation (HPE), a critical area for various applications like AR/VR, action recognition, and human-computer interaction. By addressing data limitations and depth ambiguity, this work paves the way for more accurate and robust HPE models that generalize well to real-world scenarios. This is highly relevant to current research focusing on improving HPE’s robustness and applicability across diverse settings. The proposed methods (Biomechanical Pose Generator and Binary Depth Coordinates) offer new avenues for data augmentation and depth estimation, promising significant improvements in the field.
Visual Insights#

This figure compares the distribution of the vector connecting the right shoulder to the right elbow across different datasets: H36M, 3DHP, 3DPW, and the proposed Biomechanical Pose Generator (BPG). It visualizes the distribution as a spherical coordinate plot, highlighting the range of plausible poses in each dataset. The grey regions indicate the valid range of motion for this particular joint vector, showing that BPG generates a significantly more diverse set of poses compared to the existing datasets.
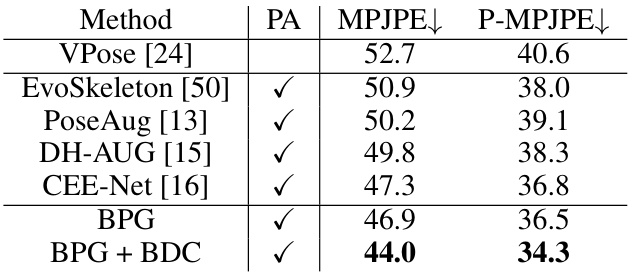
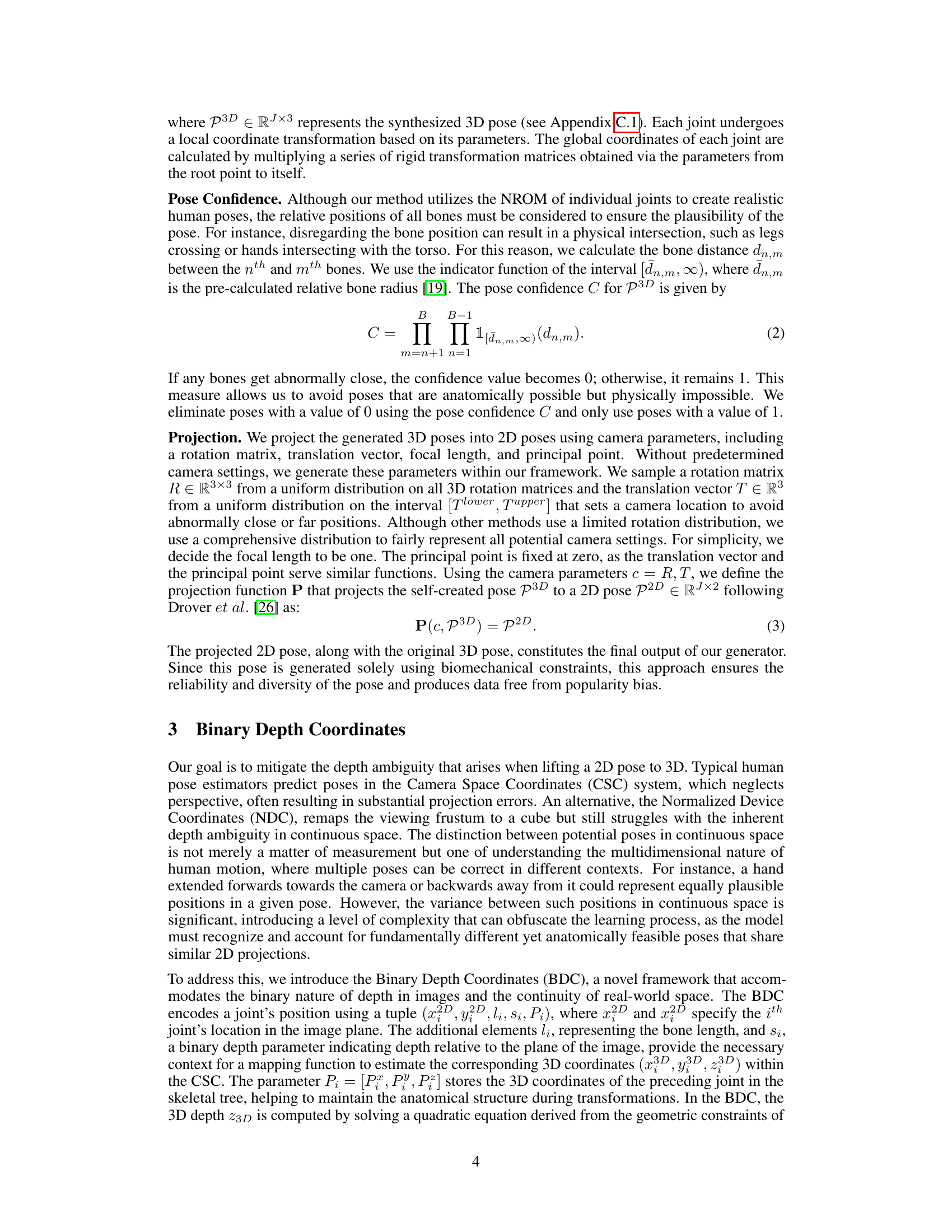
This table presents the results of pose augmentation methods on the Human3.6M (H36M) dataset. It compares the performance of different methods, including the proposed Biomechanical Pose Generator (BPG) and the combination of BPG with Binary Depth Coordinates (BDC), against several state-of-the-art methods on two evaluation metrics: Mean per Joint Position Error (MPJPE) and Procrustes aligned mean per joint position error (P-MPJPE). Lower values for MPJPE and P-MPJPE indicate better performance.
In-depth insights#
3D Pose Scalability#
Achieving scalability in 3D human pose estimation is a significant challenge due to data limitations and depth ambiguity. The popularity bias in existing datasets restricts the diversity of poses, hindering generalization to real-world scenarios. Moreover, the inherent one-to-many mapping from 2D to 3D poses exacerbates depth ambiguity, especially in complex poses. Biomechanical Pose Generation offers a promising solution by autonomously creating a wide array of plausible 3D poses based on biomechanical principles, circumventing dataset limitations. Binary Depth Coordinates simplify depth estimation, improving robustness and accuracy by reducing depth ambiguity. Together, these techniques enhance data diversity and volume, facilitating better model performance. While the approaches address key scalability bottlenecks, future research should consider temporal dynamics and explore strategies to further reduce computational overhead.
Biomechanical BPG#
The Biomechanical Pose Generator (BPG) offers a novel approach to addressing data scarcity and bias in 3D human pose estimation by leveraging biomechanical principles rather than relying solely on existing datasets. Its core innovation lies in autonomously generating a wide array of plausible 3D poses using biomechanical constraints, specifically the normal range of motion (NROM) for human joints. This method overcomes the limitations of existing datasets, which tend to be biased toward frequently occurring poses and lack the diversity needed for robust generalization. By incorporating slight variations in human body proportions, the BPG further enhances the diversity and realism of its generated data. This method’s strength is its ability to generate out-of-distribution data, essential for training robust and generalizable models that perform well in diverse real-world scenarios. The ability to generate data without relying on existing datasets reduces or eliminates popularity bias, a significant advantage over traditional data augmentation methods. While promising, further investigation is needed to fully assess the BPG’s limitations and potential impact in complex real-world scenarios.
Binary Depth Coord#
The proposed Binary Depth Coordinates (BDC) method offers a novel approach to address the persistent depth ambiguity challenge in 3D human pose estimation. Instead of directly estimating continuous depth values, BDC simplifies the problem by classifying joint positions as either in front of or behind a reference plane. This binary representation significantly reduces the complexity of the depth estimation task and makes the model more robust to noisy or ambiguous input. The method effectively decomposes the 3D pose into three core elements: 2D pose, bone length, and binary depth. This decomposition substantially simplifies the problem and increases model accuracy. The BDC framework can be seamlessly integrated into existing 3D pose estimation models, enhancing their performance without requiring extensive modifications. The efficiency and effectiveness of BDC in mitigating depth ambiguity are demonstrated through experimental results, showcasing consistent performance gains even in complex poses. This innovative approach represents a significant contribution towards enhancing the scalability and reliability of 3D human pose estimation systems.
Depth Ambiguity#
Depth ambiguity, a core challenge in 3D human pose estimation, arises from the fact that a single 2D projection can correspond to multiple 3D interpretations. This is exacerbated by increased pose diversity, as more complex poses increase the number of plausible 3D configurations. Existing methods often struggle to resolve this ambiguity, relying on continuous depth representations which can be noisy and difficult to optimize. The proposed Binary Depth Coordinates (BDC) offers a novel solution by simplifying depth estimation to a binary classification (front or back), significantly reducing the complexity of the problem and improving model robustness. This binary approach leverages geometric principles, focusing on bone lengths and 2D poses to infer depth. By decomposing the 3D pose into these core elements, BDC enhances model accuracy, particularly with complex poses where depth ambiguity is most pronounced. This method provides a significant improvement over continuous depth methods by enabling more reliable and efficient depth prediction.
Future of 3D HPE#
The future of 3D Human Pose Estimation (HPE) is bright, driven by the need for scalable and generalizable solutions applicable across diverse real-world scenarios. Addressing current limitations like popularity bias in datasets and depth ambiguity in complex poses will be crucial. Biomechanical modeling and techniques like the Binary Depth Coordinates (BDC) offer promising approaches to overcome these challenges. Future research should focus on integrating temporal information, handling occlusions and self-occlusions, and improving robustness to variations in lighting, viewpoint, and human appearance. Furthermore, exploring cross-domain learning strategies to transfer knowledge between datasets and leveraging synthetic data generation techniques can greatly enhance the field’s progress. Ultimately, advancing 3D HPE will contribute significantly to other fields like robotics, AR/VR, and healthcare, creating more natural human-computer interfaces and improved virtual reality experiences.
More visual insights#
More on figures

The figure shows the mean per joint position error (MPJPE) for different 3D human pose estimation (HPE) models plotted against the depth ambiguity ratio. Four model variations are compared: a baseline model, the baseline model with Binary Depth Coordinates (BDC), the baseline model trained with the Human3.6M dataset, and the baseline model with BDC trained with the Human3.6M dataset plus data generated by the Biomechanical Pose Generator (BPG). The BPG-augmented dataset is 10 times larger than the original H36M dataset. This illustrates how the BDC method improves model robustness and reduces sensitivity to depth ambiguity, especially with larger and more diverse datasets.

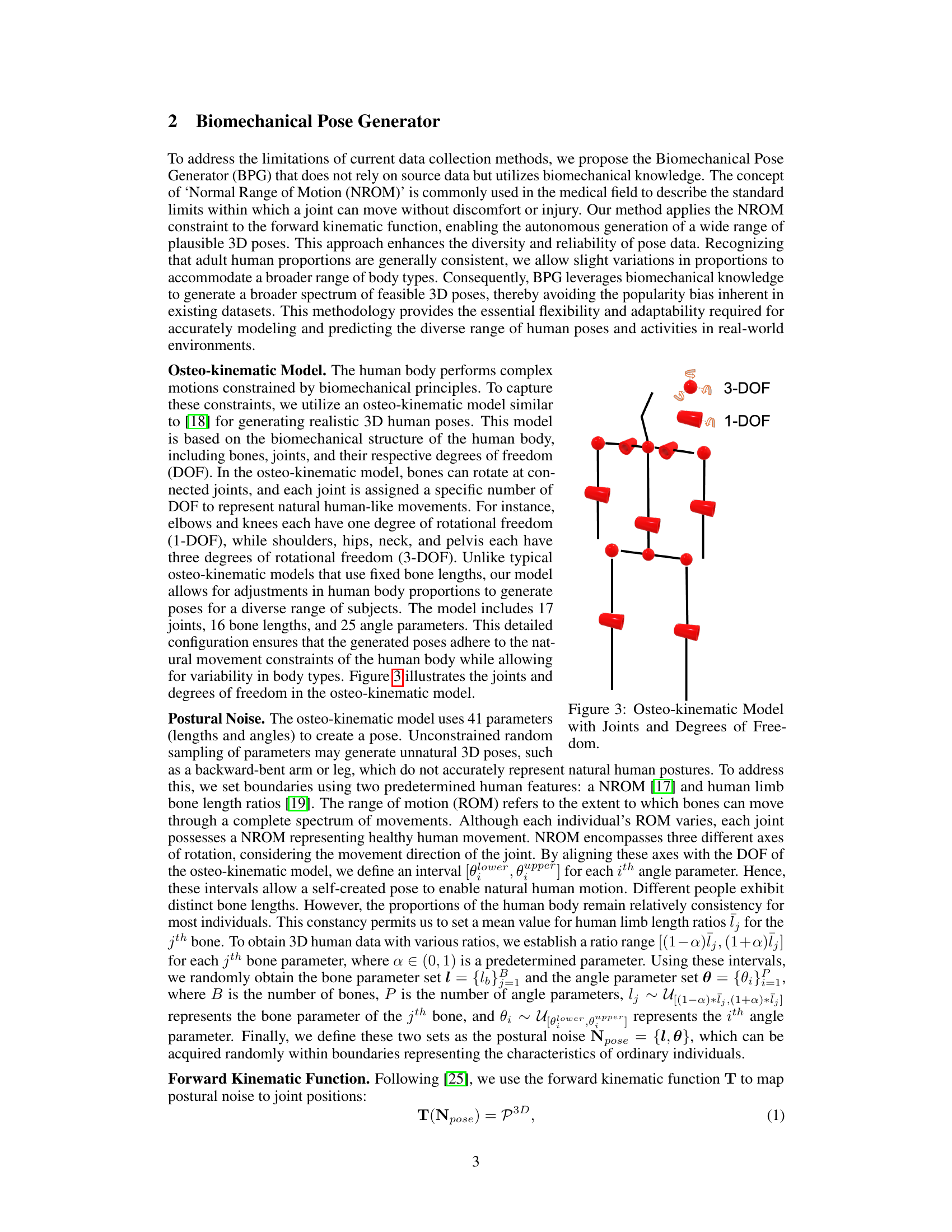
This figure shows a simplified 3D model of the human body, highlighting the joints and their corresponding degrees of freedom (DOF). The model uses 17 joints, each represented as a red cylinder, connected by black lines representing bones. Some joints, like shoulders and hips, have 3 DOF (allowing rotation on three axes), and others, like elbows and knees, have 1 DOF (allowing rotation on one axis). This model is used in the Biomechanical Pose Generator (BPG) to create plausible 3D human poses that respect the biomechanics of human movement.

This figure illustrates the process of 3D human pose estimation using Binary Depth Coordinates (BDC). The process starts with a 2D pose from the image plane. A fully connected layer processes the features from the lifting model and generates bone lengths, refined 2D pose and trajectory, and a binary depth parameter. A quadratic formula calculates possible depth values, and the binary depth parameter selects the correct depth. Finally, the 3D pose is reconstructed in the camera space coordinate system.
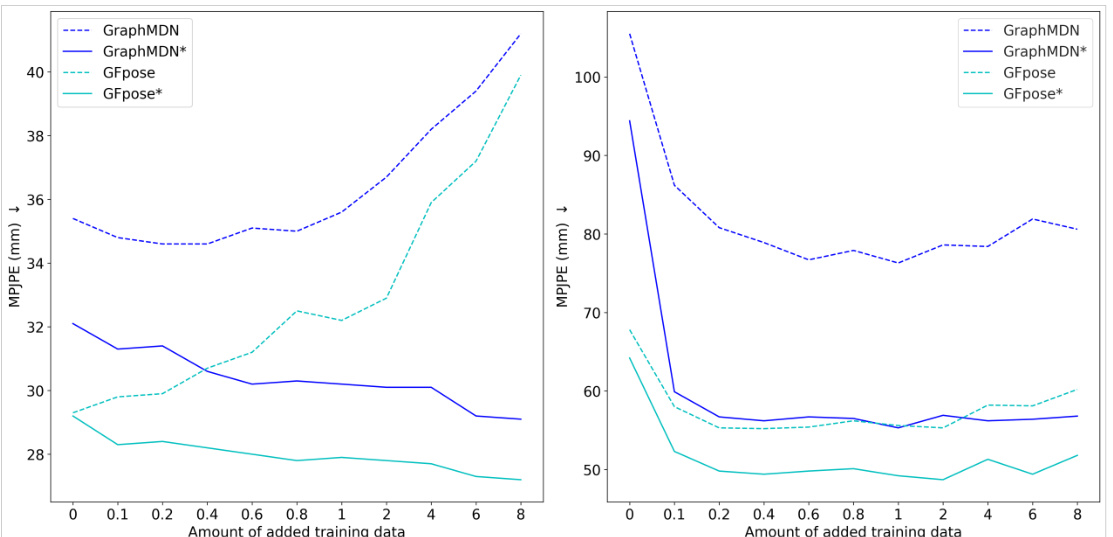
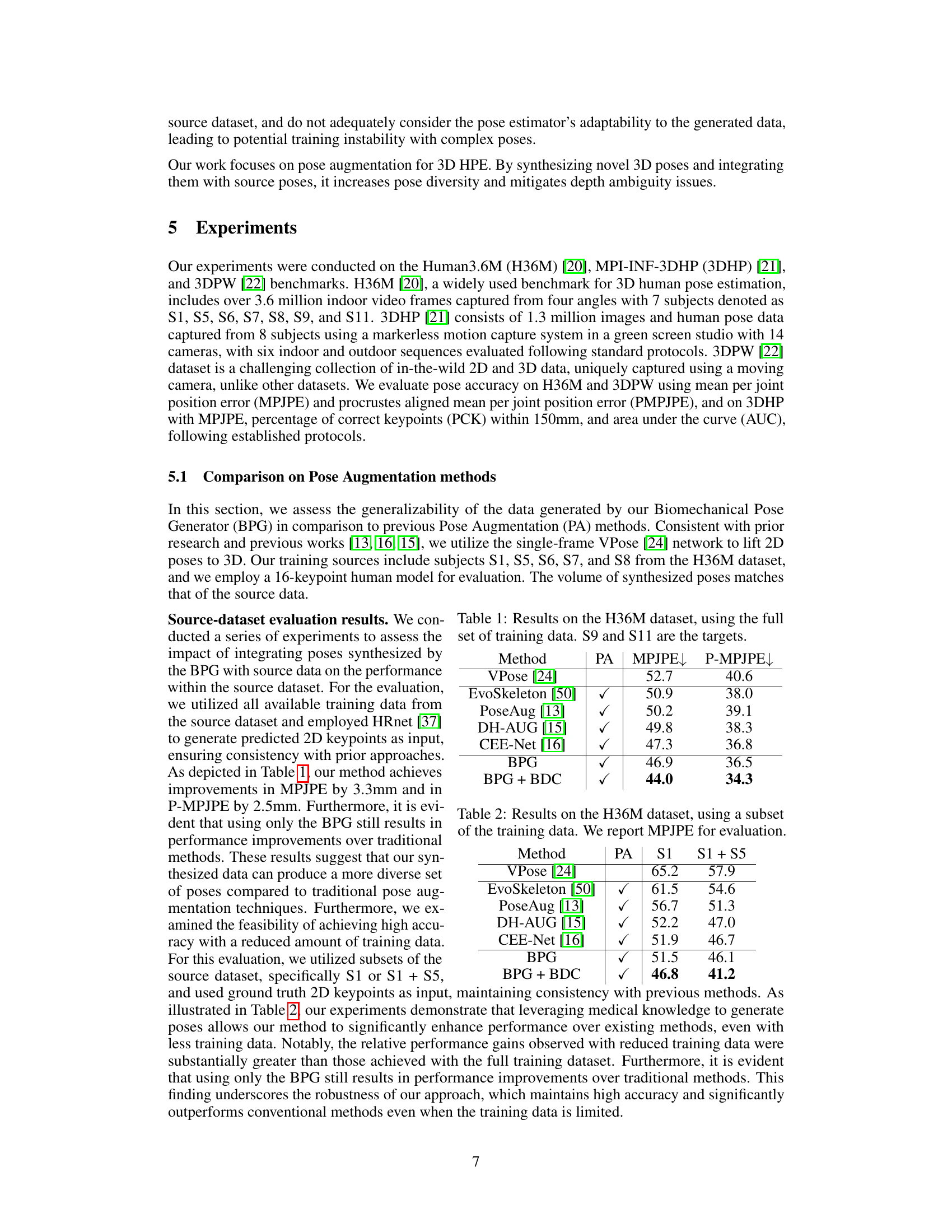
This figure shows the impact of adding training data generated by the Biomechanical Pose Generator (BPG) on the Mean Per Joint Position Error (MPJPE) for two different 3D Human Pose Estimation (HPE) models: GraphMDN and GFpose. The left panel shows results using the H36M dataset, while the right panel shows cross-domain results using the 3DHP dataset. The x-axis represents the ratio of added synthetic data to the original training data size. The ‘*’ indicates that the Binary Depth Coordinates (BDC) method was used in those models. The figure demonstrates that adding BPG data improves the performance of both models, and that the BDC further enhances this improvement, especially in the cross-domain scenario.

This figure shows the distribution of joint angles in the datasets H36M, 3DHP, 3DPW and the proposed Biomechanical Pose Generator (BPG). The spherical coordinate distribution visualizes the range of motion of the right elbow relative to the right shoulder. The grey areas represent valid pose regions according to human biomechanics, demonstrating that the BPG generates poses that are more diverse and realistic than those in the existing datasets, which often suffer from popularity bias (i.e., overrepresentation of common poses).
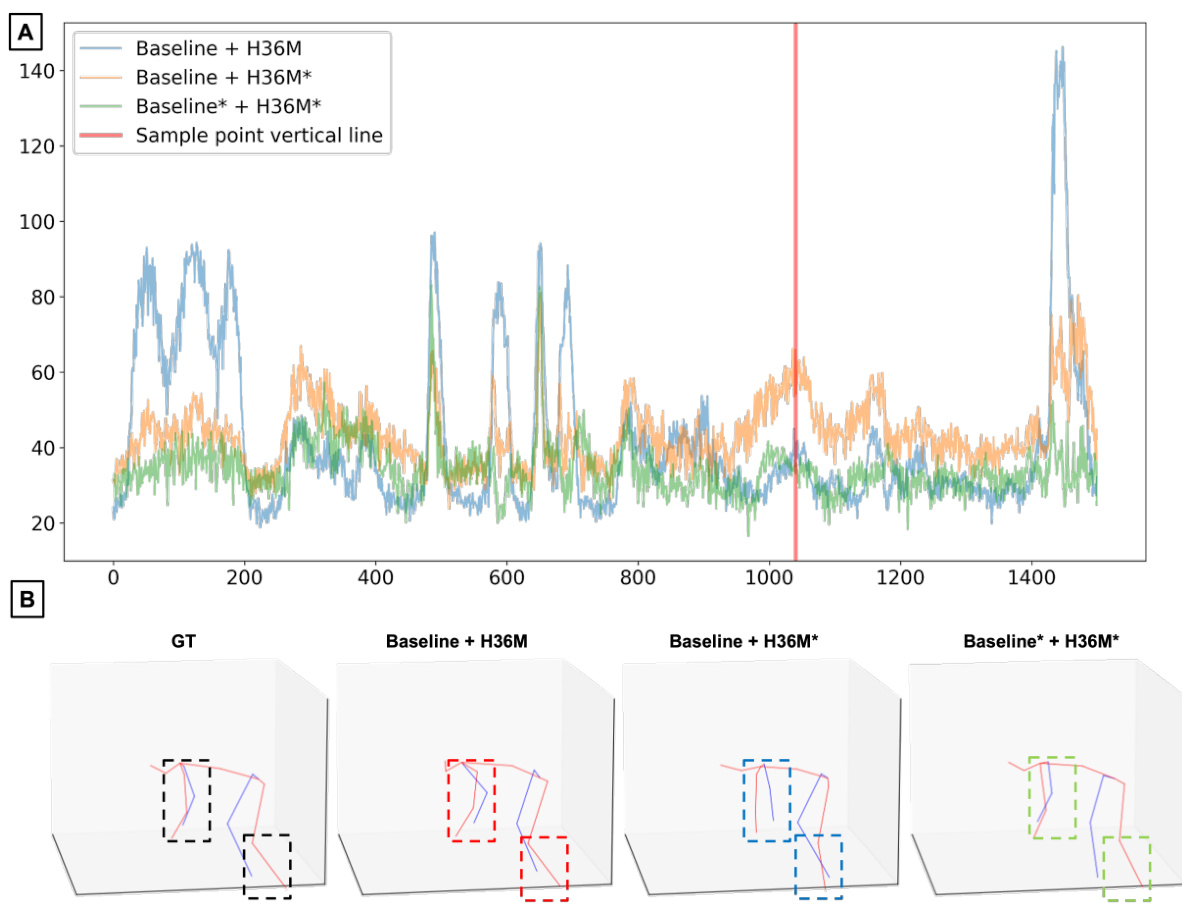
Figure 7 presents a frame-wise comparison of 3D human pose estimation results on the Human3.6M dataset using different methods. The top panel (A) displays the mean per joint position error (MPJPE) across frames for three conditions: 1) a baseline model trained only with H36M data; 2) a baseline model trained with H36M data and augmented with data from the Biomechanical Pose Generator (BPG); 3) a BDC-enhanced baseline model trained with H36M and BPG data. The bottom panel (B) visually compares the ground truth poses (GT) with estimated poses from the three conditions, focusing on a particular time point indicated in panel (A) by a vertical line. The figure shows how the proposed method (BDC and BPG) improves pose estimation accuracy, especially in challenging frames.
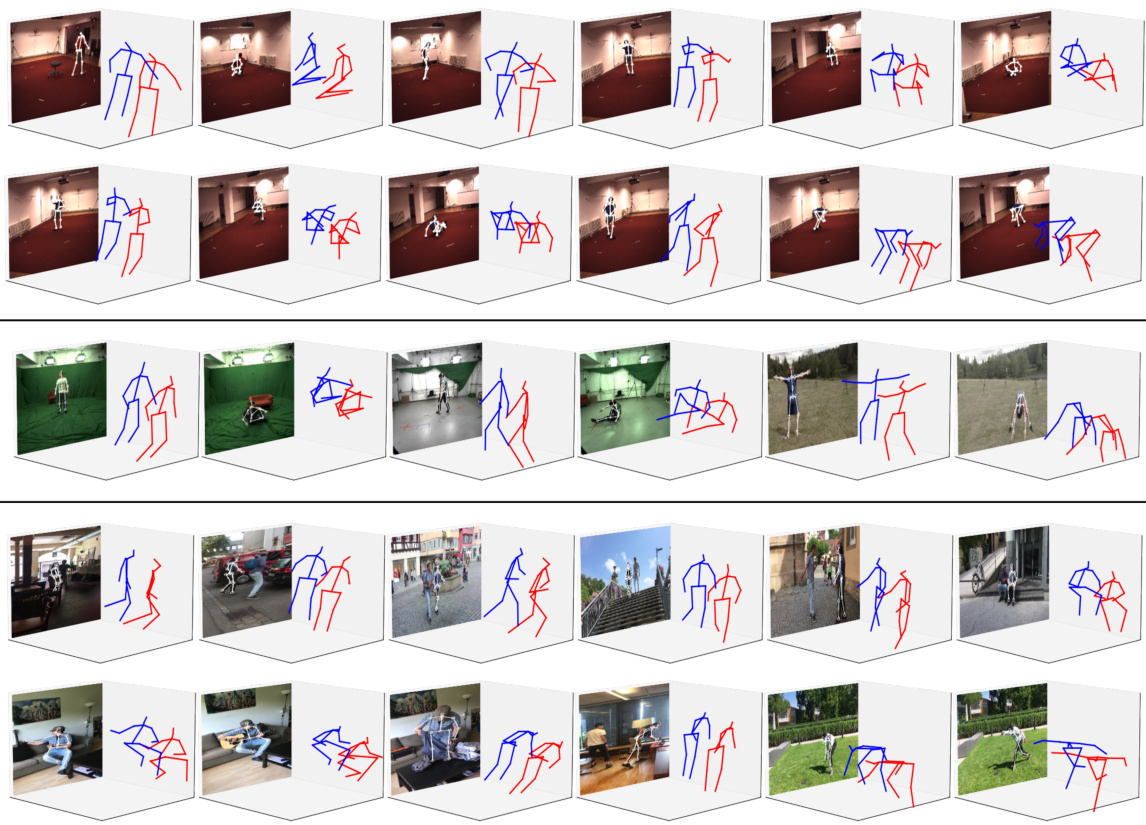
This figure shows a qualitative comparison of ground truth poses (in blue) and the model’s predicted poses (in red) across various datasets. The datasets used are Human3.6M (H36M), MPI-INF-3DHP (3DHP), and 3DPW. Each row represents a different dataset, showing several examples of poses. The visualization helps assess the model’s performance in accurately predicting human poses in different scenarios and datasets.

This figure shows a visualization of various 3D human poses generated using the Biomechanical Pose Generator (BPG). The poses illustrate the diversity and range of motion achieved by the BPG, which is designed to overcome the limitations of existing datasets by generating poses based on biomechanical principles rather than relying on pre-existing data. Each pose is represented as a stick figure, highlighting the joint locations.
More on tables
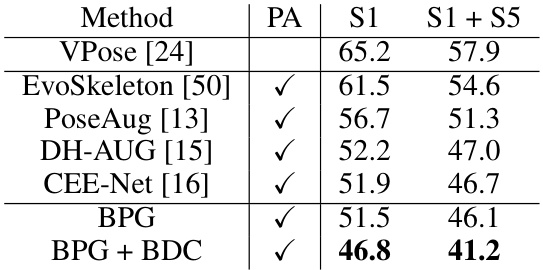
This table presents the results of the experiment comparing various pose augmentation methods using a subset of the H36M training data. The performance is evaluated using MPJPE (mean per joint position error). The methods compared include VPose, EvoSkeleton, PoseAug, DH-AUG, CEE-Net, BPG, and BPG+BDC. The table shows the MPJPE for each method on two different subsets of the training data: S1 and S1 + S5. The BPG+BDC method shows a considerable improvement in performance compared to other methods, especially with the reduced training data.
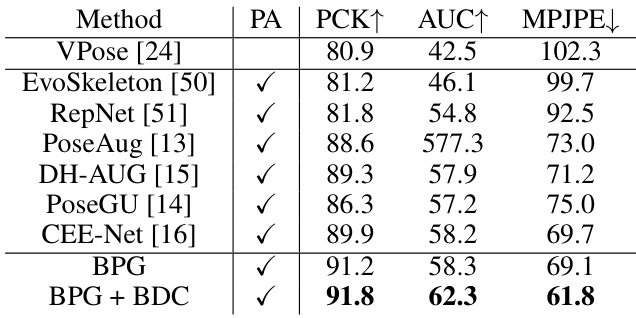
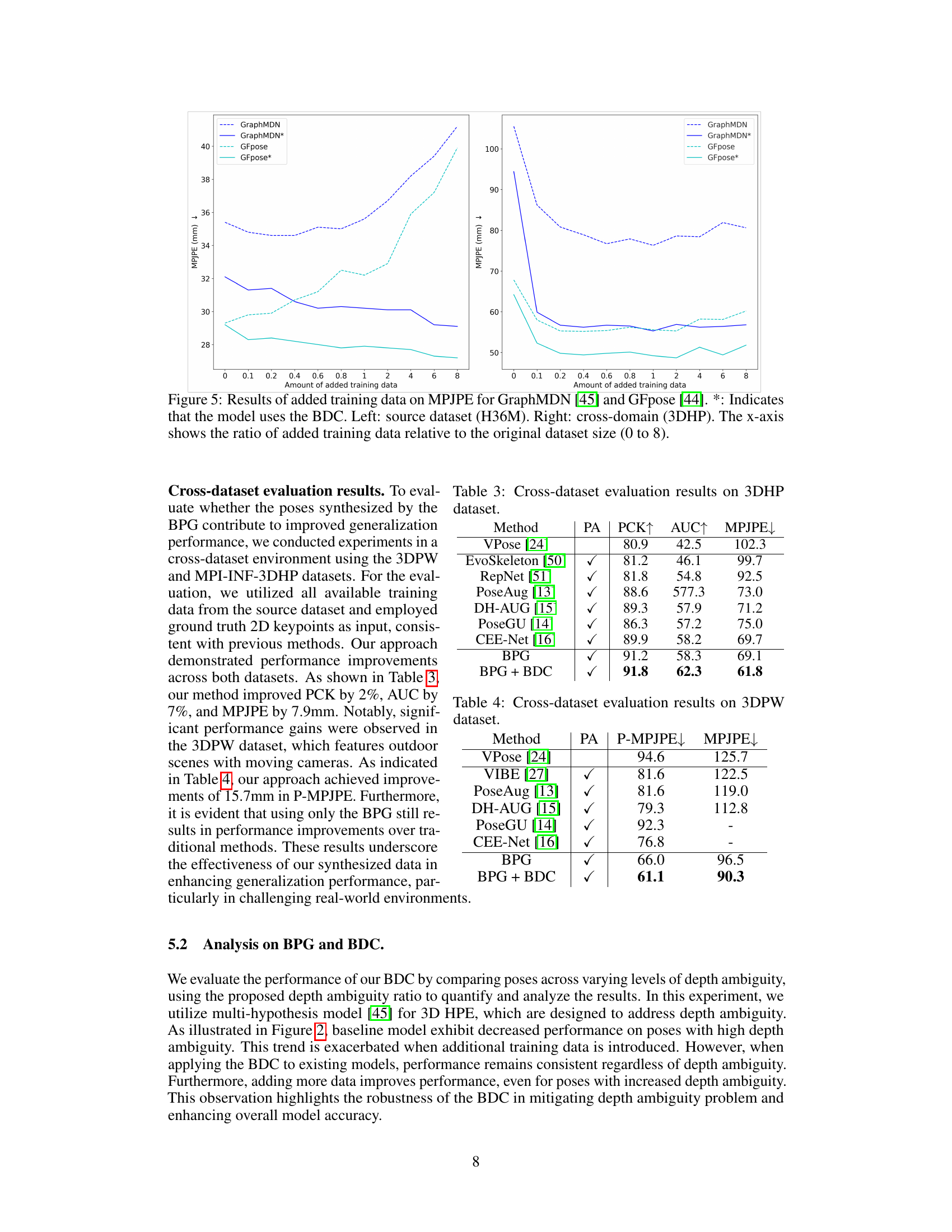
This table presents the cross-dataset evaluation results on the 3DHP dataset, comparing different pose augmentation methods. The methods are evaluated using PCK (Percentage of Correct Keypoints), AUC (Area Under the Curve), and MPJPE (Mean Per Joint Position Error). The table highlights the performance gains achieved by integrating the Biomechanical Pose Generator (BPG) and Binary Depth Coordinates (BDC) compared to existing pose augmentation methods.
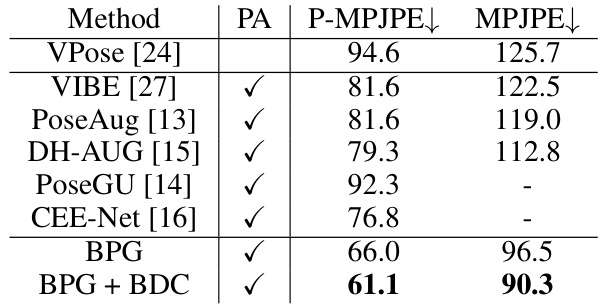
This table presents the cross-dataset evaluation results on the 3DPW dataset for different pose augmentation methods. It shows the performance of various methods, including the proposed Biomechanical Pose Generator (BPG) and Binary Depth Coordinates (BDC), in terms of P-MPJPE and MPJPE. The results demonstrate the effectiveness of the proposed methods in improving accuracy and generalization across different datasets.
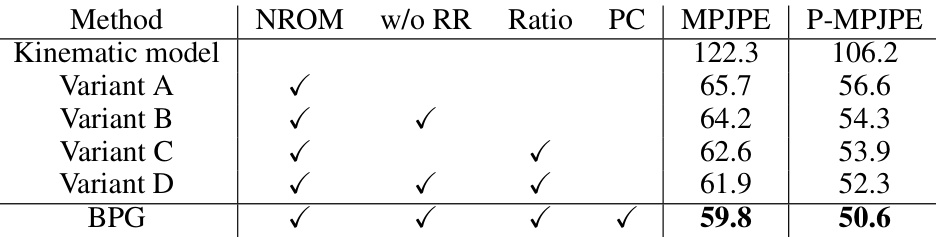
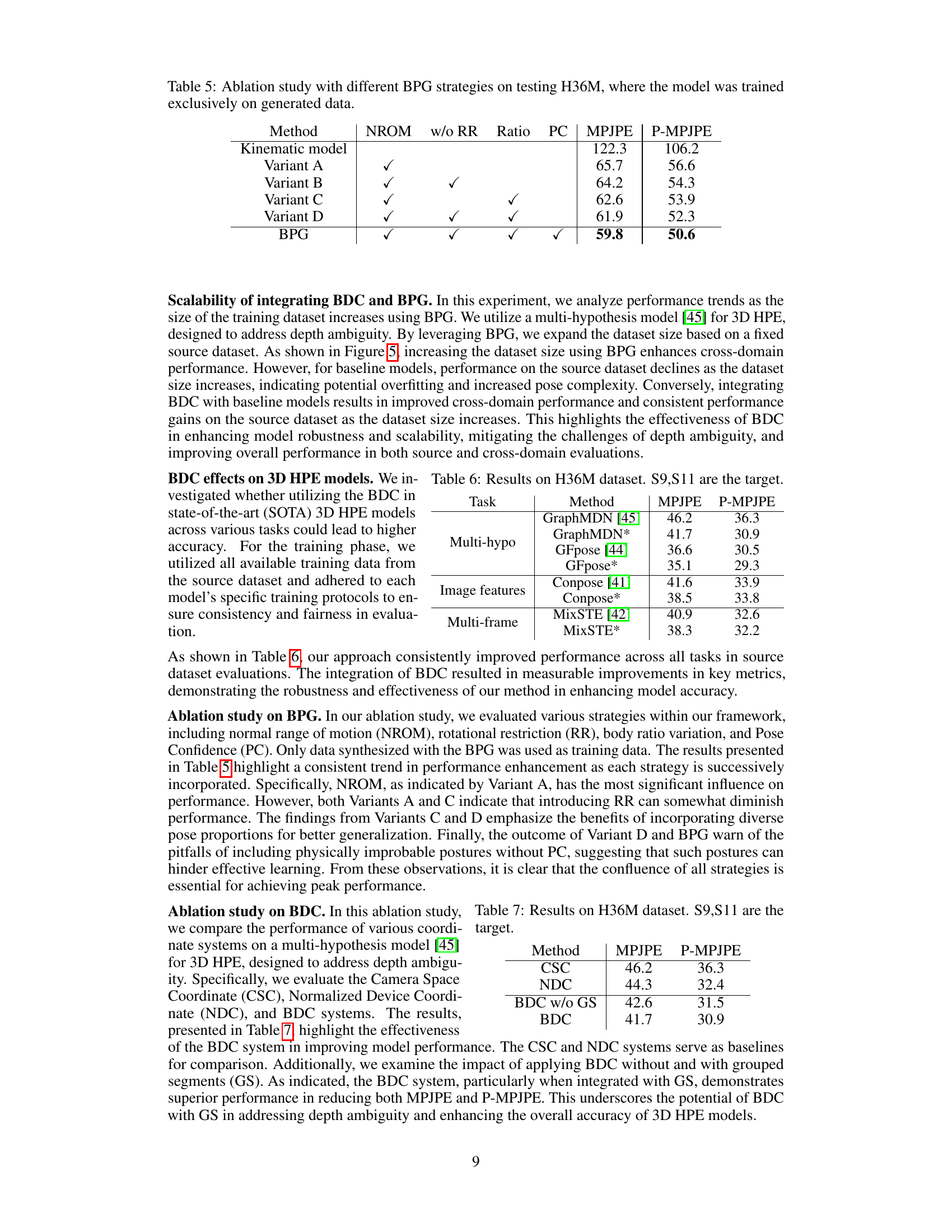
This table presents the results of an ablation study that investigates the impact of different components of the Biomechanical Pose Generator (BPG) on the performance of a 3D human pose estimation model. The model was trained exclusively using data generated by the BPG. The study analyzes the effect of using Normal Range of Motion (NROM), body ratio variations, and pose confidence in creating realistic poses. Different variants of BPG are compared against the full BPG method in terms of MPJPE and P-MPJPE.
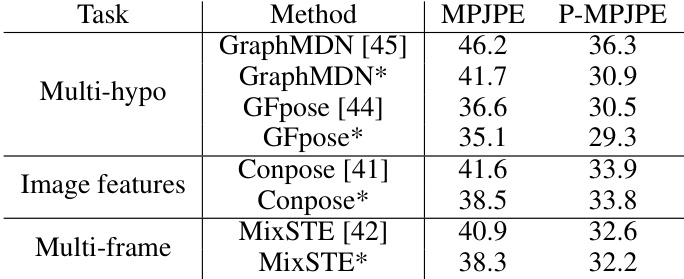
This table presents the results of experiments conducted on the Human3.6M (H36M) dataset, specifically focusing on subjects S9 and S11. It compares the performance of several state-of-the-art (SOTA) 3D human pose estimation (HPE) models, both with and without the integration of Binary Depth Coordinates (BDC). The models are categorized into three groups based on their approach: multi-hypothesis, image features, and multi-frame. The MPJPE (Mean Per Joint Position Error) and P-MPJPE (Procrustes Aligned MPJPE) metrics are used to evaluate the accuracy of the 3D pose estimation.

This table presents an ablation study comparing different Biomechanical Pose Generator (BPG) strategies. It shows the impact of using Normal Range of Motion (NROM), body ratio variations, and pose confidence on the model’s performance when trained solely on synthetic data generated by BPG. The results are evaluated using MPJPE and P-MPJPE metrics on the Human3.6M (H36M) dataset.
Full paper#